Tool/software: Linux
Hi,
I am using TDA2X vision EVM board to develop 3D surround view function. We run the calibration using the calibration tool. We found front and rear cameras can not be calibrated perfectly.
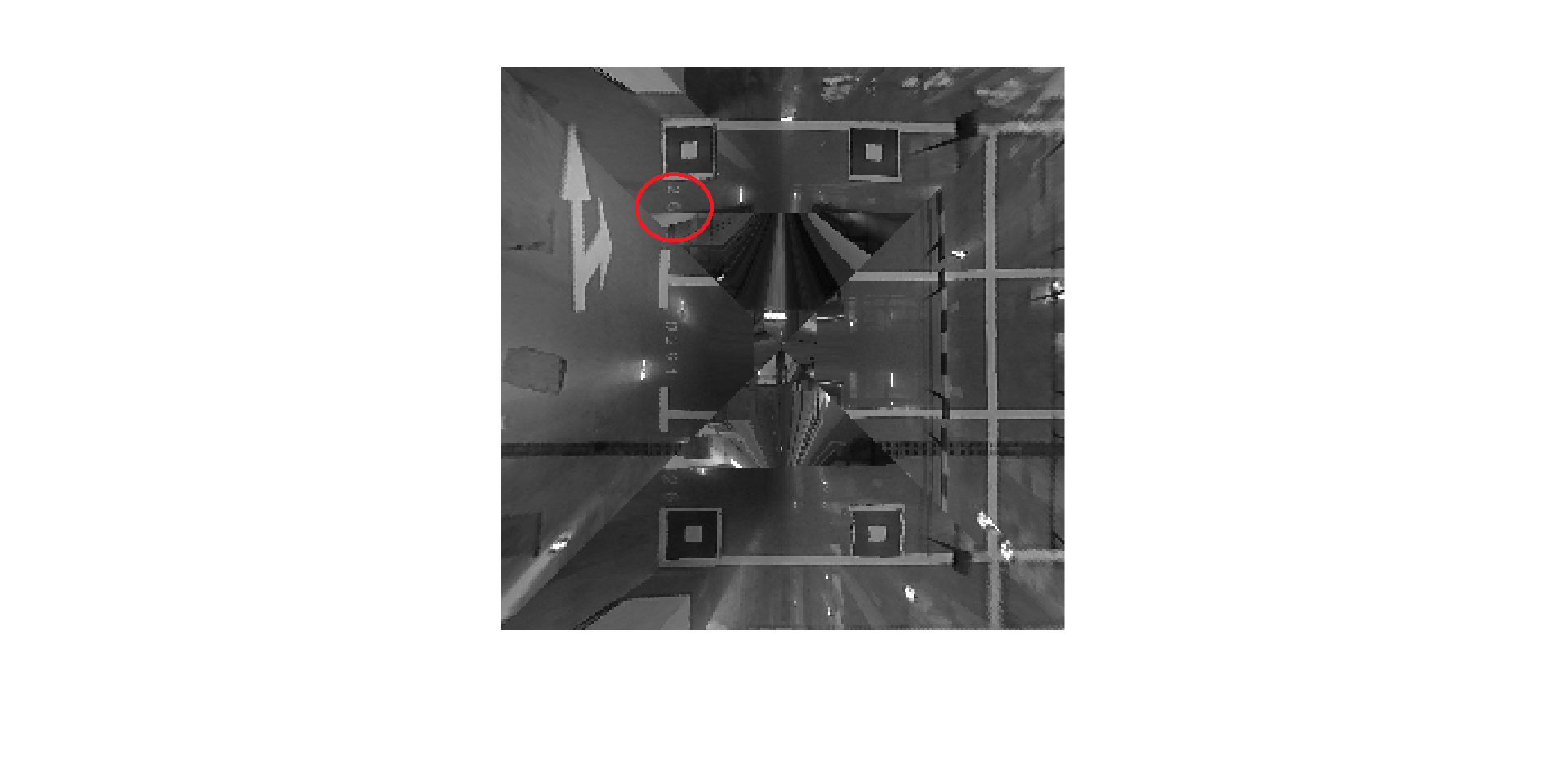
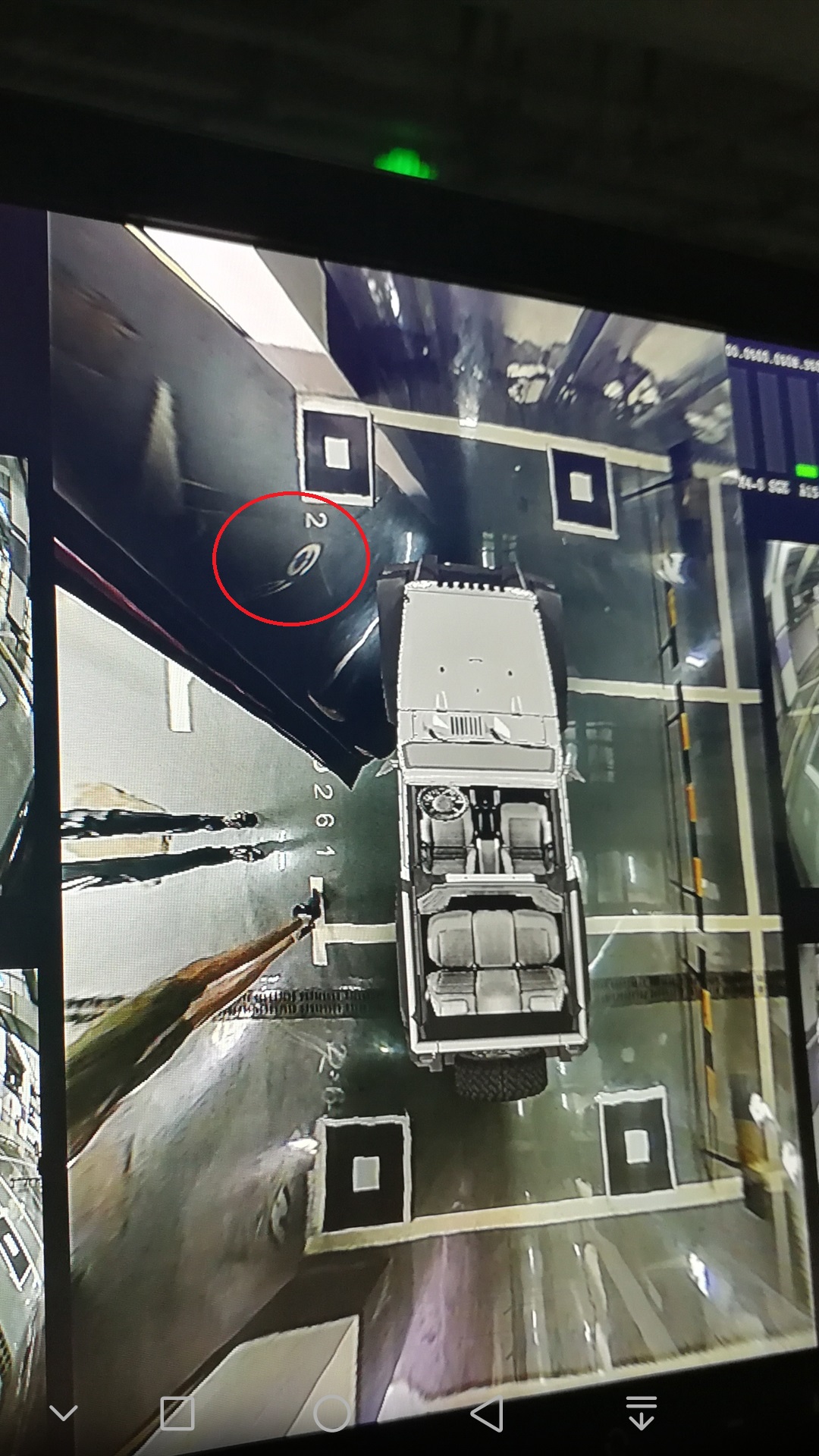
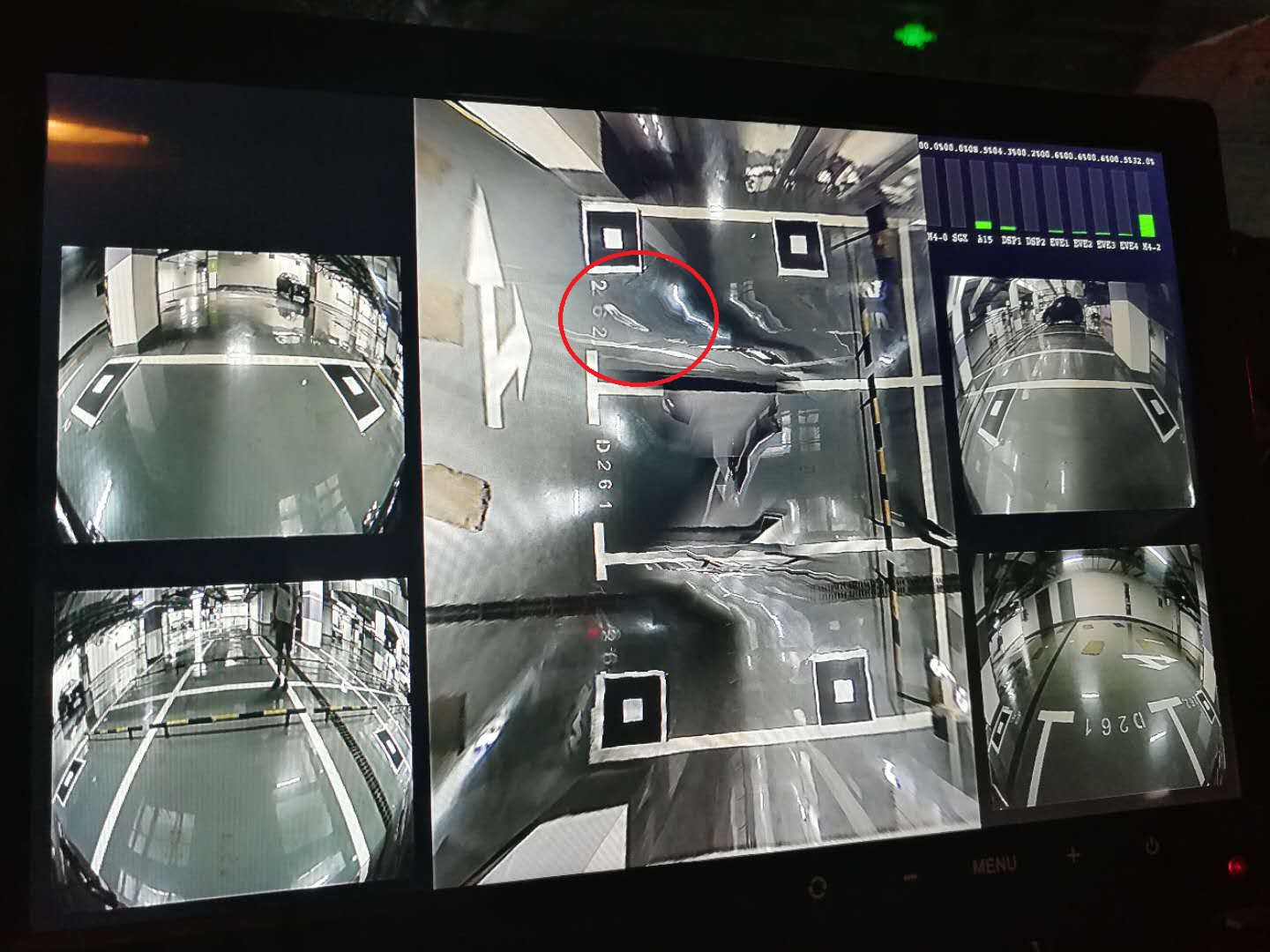
Look at the picture below. The straight line becomes curved when it passes the front camera. I think it is because the lens distortion is not completely corrected. In the lens LUT generation tool, the maximum angles are limited to below 90. Will this be a problem?
In another thread, you said you can provide the calibration tool source code. Can you provide that to me so we can debug what is wrong? Thanks.

1. front camera can not be calibrated perfectly.