Hi, This is LG member.
The previous questions are replied by Karan Saxena, Sujith.
I have a question and would like to get the explanation against your replies by Karan Saxena.
It is a additional question in "Testing CAN application of MCUSW of PSDKRA_RTOS(v0.9) in J721EXCP01EVM(Board)"
Below it is the latest Karan Saxena's answers.
From f2bc02076c31e529882286261a1cb67899ec06f8 Mon Sep 17 00:00:00 2001 From: Karan Saxena <karan@ti.com> Date: Mon, 23 Sep 2019 13:43:22 +0530 Subject: [PATCH] Add Rx support"For the first level tests, just copy the message which you were receiving while running the application in Tx mode and use the same message to send to the MCAN in the Rx only case. This is important as the message ID-based filtering happens during the reception of the message and if you send an ID for which the MCU MCAN0 does not have any filter configured - it'll reject it."
After your answer, I asked a question additionally.
I replied like below :
--------------------------------------------------------------------------------------------------------------------------
After applying above your patch, the error is happened via your patching.
I just modified for the compiling and finished compiling it.
I wasn't able to understand your test method.
Could you explain your test method in details ?
What i am saying is the CAN communication between EVM Board and CANoe.
I can't receive any response in EVM board because message ID-based filtering.
I don't know how i configure the things, related to ID in CANoe.
-----------------------------------------------------------------------------------------------------------------------------
Perhaps Karan Saxena would remembers below my question.
Please, need to check this question and explain about these.
Start : I remind the latest question from me ----------------------------------------------------------------------------------
Hi. This is LG member.
I modified for the above mentioned errors, like below
@@ -162,17 +165,21 @@ sint32 CanApp_ProfileTest(canAppTaskObj_t *testParams)
uint32 mask = 0x00000000U;
#endif
uint32 ctlr_cnt;
+#if defined TX_ONLY
const Can_PduType *PduInfo;
uint8 hth = 0U;
+#endif // modified by TI patch
Can_ReturnType status;
- uint32 loopCnt, itr, totalCanMsgPerSec, totalCpuload;
- float totalTimePerMsg;
+ //uint32 loopCnt, itr, totalCanMsgPerSec, totalCpuload;
+ uint32 loopCnt, itr;
+ //float totalTimePerMsg;
Utils_PrfLoad computedLoad;
- uint64_t preTimeStamp, postTimeStamp;
- float canBusTime;
+ //uint64_t preTimeStamp, postTimeStamp;
+ //float canBusTime;
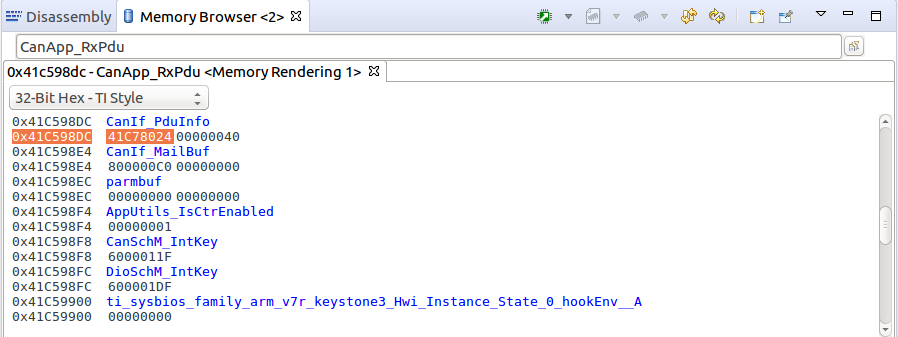
CanApp_RxPdu = &CanIf_PduInfo;
/* Message for CAN-FD(MCAN0 module) */
+#if defined TX_ONLY
PduInfo = &CanApp_Pdu;
/* Setting Up CAN FD Extended Frame*/
CanApp_Pdu.id = 0xC0 | 0xC0000000U;
@@ -189,7 +196,8 @@ sint32 CanApp_ProfileTest(canAppTaskObj_t *testParams)
CanApp_DemStatus = E_OK;
CanApp_DetStatus = E_OK;
-
+#endif // modified by TI patch
....
@@ -282,25 +310,25 @@ sint32 CanApp_ProfileTest(canAppTaskObj_t *testParams)
#endif
/* Calculating Can Bus Time in micro sec based on STD or EXT Id */
- if ((PduInfo->id & 0xC0000000U) == 0xC0000000U)
- {
+// if ((PduInfo->id & 0xC0000000U) == 0xC0000000U)
+// {
/* Extended Id */
- canBusTime = 153.6f;
- }
- else
- {
- /* Standard Id */
- canBusTime = 134.5f;
- }
- AppUtils_Printf(MSG_NORMAL, MSG_APP_NAME
+// canBusTime = 153.6f;
+// }
+// else
+// {
+// /* Standard Id */
+// canBusTime = 134.5f;
+// }
+/* AppUtils_Printf(MSG_NORMAL, MSG_APP_NAME
CAN_TX_RX_MSG " %u packets %d times\n",
testParams->numTxPackets, testParams->numIterations);
-
+*/
/* Number of packets transmitted * number of iterations *
1 or 2 (2 in case of tx & rx) transmitted in msecs (computed
above)
*/
- AppUtils_Printf(MSG_NORMAL, MSG_APP_NAME
+/* AppUtils_Printf(MSG_NORMAL, MSG_APP_NAME
"Average of %lld.%02d usecs per packet \n",
CanProfileCumulativeTx / (testParams->numTxPackets *
testParams->numIterations),
@@ -310,10 +338,10 @@ sint32 CanApp_ProfileTest(canAppTaskObj_t *testParams)
((float)CanProfileCumulativeTx / ((float)testParams->numTxPackets *
(float)testParams->numIterations)));
totalCanMsgPerSec = (1000000.0f / totalTimePerMsg);
-
+*/
/* Hardware interrupt handler load + Software interrupt handler +
task load */
- totalCpuload = computedLoad.hwiLoad + computedLoad.swiLoad +
+/* totalCpuload = computedLoad.hwiLoad + computedLoad.swiLoad +
computedLoad.tskLoad;
-
+*/
/* Set Controller Mode to Stop*/
status = Can_SetControllerMode(
CanConfigSet_CanController_List_PC[ctlr_cnt]->ControllerId,
-------------------------------------- End
I modified like above. It is these all, modified by me.
And then, I finished compiling your release TDA4_RSDKRA_RTOS_v0.9.0.1 version(MCUSW 00.09.02.01).
If it is not problem, as next step, could you help me to understand the test setup and where I need to modify in order to modify the Rx filter.
END : I remind the latest question from me ----------------------------------------------------------------------------------
I'd like to receive your reply as soon as possible.
If you need to get the detailed content, please refer to "Testing CAN application of MCUSW of PSDKRA_RTOS(v0.9) in J721EXCP01EVM(Board)" issue
Thanks,
Regards,
LG member.