


Hi,
I tested IWR6843ISK unsing OOB Demo in SDK3.5.
I observed the detection result of the same target through the visualizer by changing only the extendedMaxVelocity and compRangeBiasAndRxChanPhase command in Cfg.
(The correction value was measured by referring to the SDK guide)
When the correction and the velocity extend were used together, the target detection result was strange.
(The detected range is the same, but the doppler and angle seem to be wrong)
Below is the result when using either one or not both.

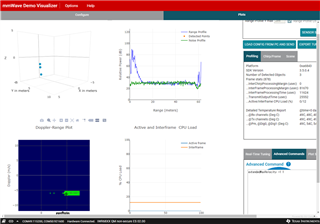
Below are the results when using both.

Below is the cfg file used for testing.
sensorStop
flushCfg
dfeDataOutputMode 1
channelCfg 15 7 0
adcCfg 2 1
adcbufCfg -1 0 1 1 1
profileCfg 0 60 105 7 33.64 0 0 30 1 320 12499 0 0 158
chirpCfg 0 0 0 0 0 0 0 1
chirpCfg 1 1 0 0 0 0 0 4
chirpCfg 2 2 0 0 0 0 0 2
frameCfg 0 2 16 0 100 1 0
lowPower 0 0
guiMonitor -1 1 1 1 0 0 1
cfarCfg -1 0 2 8 4 3 0 15 1
cfarCfg -1 1 0 4 2 3 1 15 1
multiObjBeamForming -1 1 0.5
clutterRemoval -1 0
calibDcRangeSig -1 0 -5 8 256
extendedMaxVelocity -1 1
% extendedMaxVelocity -1 0
bpmCfg -1 0 0 1
lvdsStreamCfg -1 0 0 0
compRangeBiasAndRxChanPhase 0.0762179 -0.60397 -0.64542 -0.66522 -0.66946 -0.64209 -0.70471 -0.37708 -0.86667 -0.76633 -0.37451 -0.84061 -0.35657 -0.78491 -0.30798 -0.61557 -0.57355 -0.83316 0.55045 -0.82367 0.56708 -0.82932 0.52661 -0.97696 0.17557
% compRangeBiasAndRxChanPhase 0.0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0
measureRangeBiasAndRxChanPhase 0 1.5 0.2
CQRxSatMonitor 0 3 4 79 0
CQSigImgMonitor 0 105 6
analogMonitor 0 0
aoaFovCfg -1 -90 90 -90 90
cfarFovCfg -1 0 0 49.99
cfarFovCfg -1 1 -10 10.00
calibData 0 0 0
sensorStart
How do I use extendedMaxVelocity and compRangeBiasAndRxChanPhase together?
Thanks.



