Other Parts Discussed in Thread: TMAG5170, DRV5056, DRV5055
Hi,
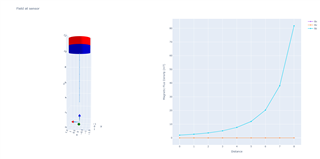
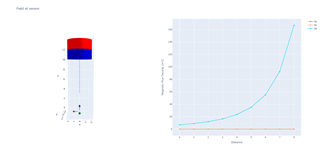
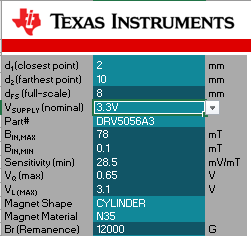
I am looking for optimal option for magnet dimensions and material(N35/N38) for below criteria.
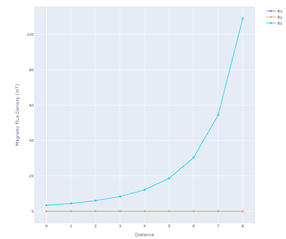
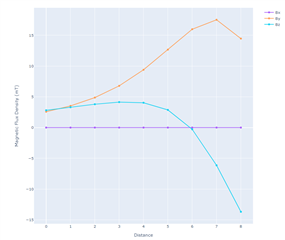
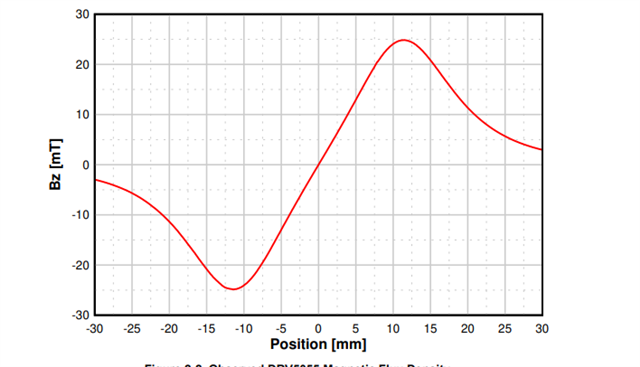
I have concern as the distance increases, the resolution is decreasing. (exponential relation)
1. Is it possible to provide the magnet dimension and material which would be optimal in size?
2. Is it possible with low range and more sensitivity e.g DRV5055A2?
3. I am also looking for ADC to SPI chip which can handle this operation?
Thank you.