


Other Parts Discussed in Thread: DRV411
Hi expert,
I'm trying to understand how DRV401 can co-work with my magnetics and probe design.
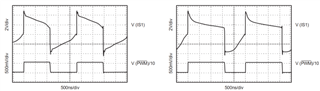
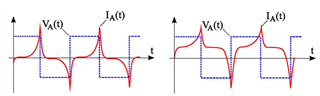
DRV401 offers IS1/IS2 as probe interfaces however it doesn't mention how the probe should be like, only below probe current waveforms are shown.
My three questions are:
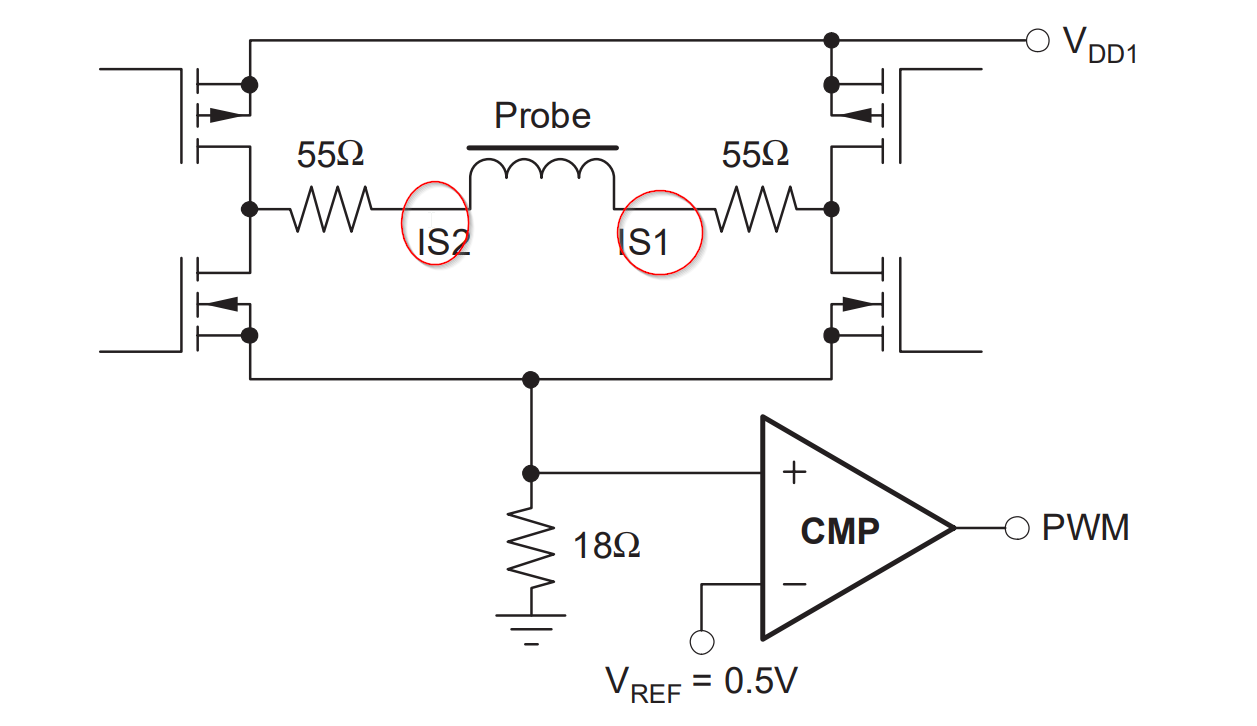
①how this probe (saturable inductor as normal) is excited and biased by DR401? I cannot image what the excited source is like through the 50% duty-cycle IS1 waveform in datasheet.
②Is the PWM duty cycle or width, strictly proportional to primary side input current? And how to ensure this principle?
③I have learned that closed-loop fluxgate can achieve very high accuracy, however no claimed accuracy found in datasheet, TI also has closed-loop AFE DRV411, very similar with DRV401 and the only difference is the probe (fluxgate or hall element), the accuracy is claimed 0.2% max in the first page, I'm just confused what's the accuracy differences between these two schemes?
As in my understandings, the closed-loop current transformers structure are totally the same, the key point should be the probe open-loop accuracy, which can more accurately report zero-magnetic flux, correct or not?
Thank you very much for your kind help and explanations.


 (left is when Ip=0, right is when Ip>0)
(left is when Ip=0, right is when Ip>0)