Other Parts Discussed in Thread: TMAG5115
Hi
In our application the distance between the object and the TMAG513 can be as close as 2~4mm.
any suggestion what we need to pay attention to when doing the design ?
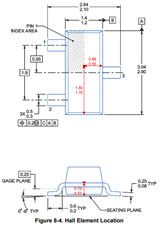
also can you advise the hall sensor's die position in the package ? thanks!