Other Parts Discussed in Thread: LDCCOILEVM,
Hello,
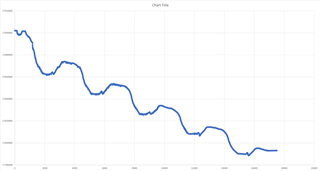
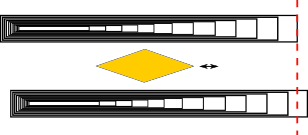
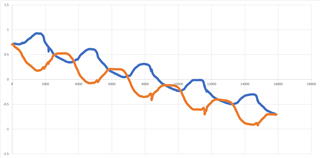
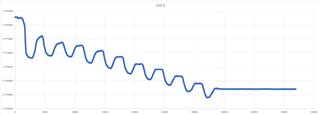
I am seeing some unexpected output code oscillations which trend in the expected linear direction over any linear displacement. The oscillations appear to repeat every 2mm. The following data was taken with Test Setup #1 as described below. For this test, a 4mm wide copper target was roughly 1-2mm away, and moved 20mm over the coil. The coil used was Coil B from the LDCCOILEVM sample kit. Note: The steady reading towards the end was when the target stopped moving (hit the 20mm mark), but the EVM GUI was still recording.
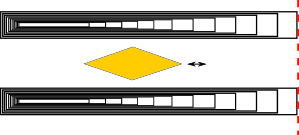
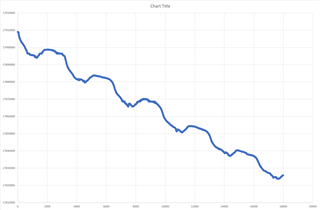
The following was taken using the same setup (Test Setup #1), except a 15mm target over 11mm travel distance over the coil.
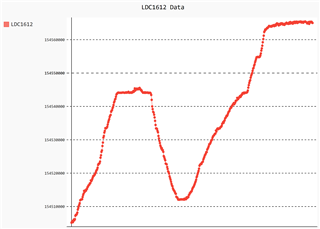
Below is a sample output from Test Setup #2 (custom PCB, described below), using a 4mm wide copper target over a linear displacement of just a few mm, on a custom PCB & coil. Opposite direction as the two examples given above.
Test Setups:
The results have been replicated in the following two fairly different test setups:
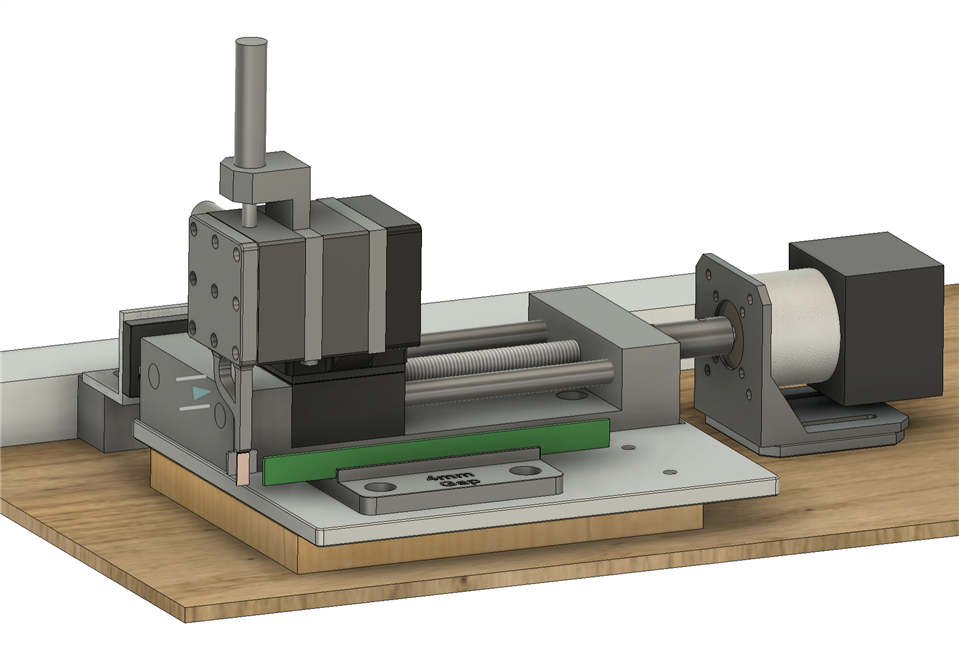
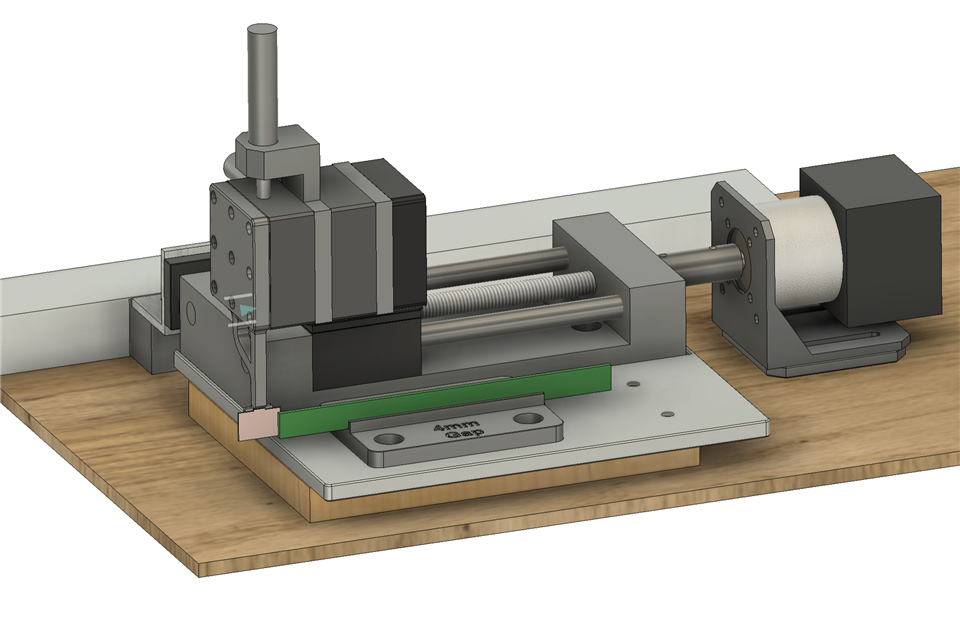
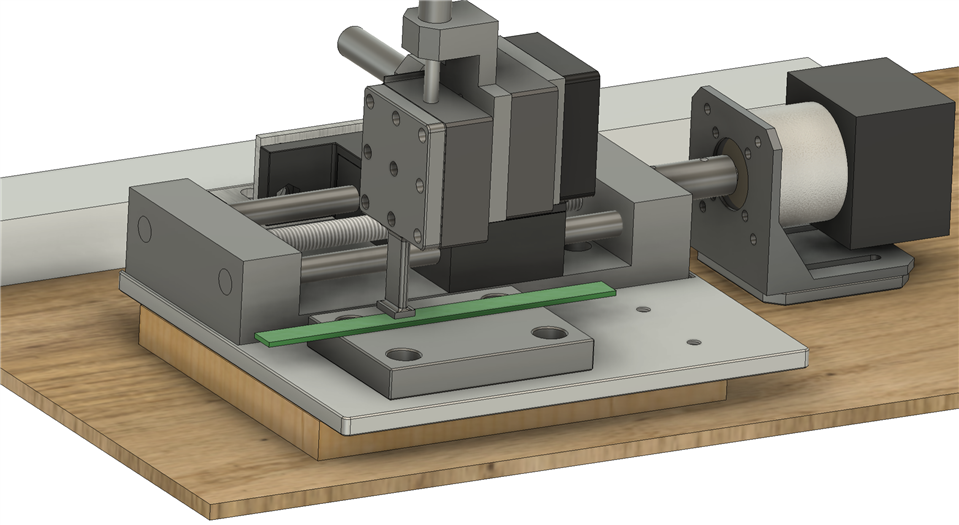
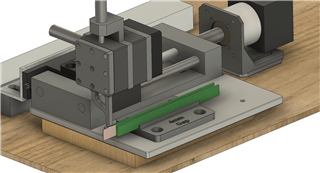
- Using the 1614 EVM with Coil B or C from the LDCCOILEVM sample kit on a reduction geared stepper motor test fixture with position feedback (5um resolution). The motor drives a rail guided linear stage to accomplish the linear displacement. Tested with both a 4mm wide and 15mm wide copper target extending beyond both ends of the coil at 1-2mm distance from the coil.
- Using a custom PCB with a LDC1612 and a built-in rectangular coil (80mm x 8mm). Using the same stepper motor fixture as test setup #1. Tested with a 4mm wide copper target extending beyond both ends of the coil. 1-2mm distance from the coil.
Do you have any suggestions for removing the oscillations from the output, or possible causes for this issue?
Please let me know if you need any additional information about my test setup or configurations.
Thanks in advance for any recommendations or support.
Best,
Minnow