Dear team,
We use a MCU to configure the AWR2243 chip.
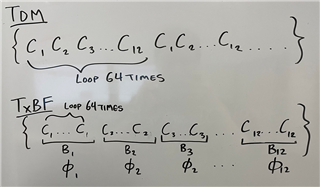
Now one set of TDM-MIMO configuration has been set to AWR2243 and it works very well.
We would like to switch it to beamforming mode by sending some commands to reconfigure the AWR2243 chip without power off the whole board.
For TDM-MIMO mode the advanced frame cofigurations were not used but the beamforming mode need it.
We are wondering how to do that and if there is any related document or guide.
Thanks a lot.
Related post here as referrence: e2e.ti.com/.../awr2243-how-to-adjust-awr2243-configurations