Other Parts Discussed in Thread: TMAG5170
Hi, TI team
Does the 3D hall sensor TMAG5170-Q1 support the following application?
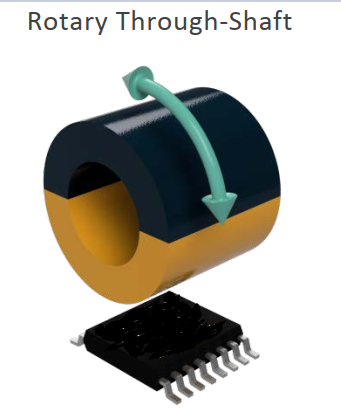
is there any difference compare to the on shaft application, like the angle accuracy?
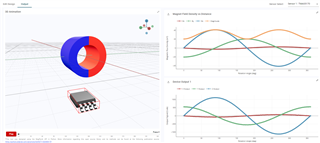
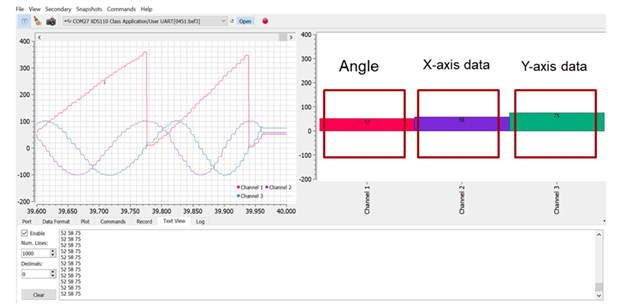
below is the on-shaft use case and the result from TI web site (3D Hall-Effect Sensor for Knobs in Appliances. (ti.com.cn))
 |
 |
thanks