Hello.
There are several questions when using LDC1612 to measure the height of different areas on coils and metal planes:
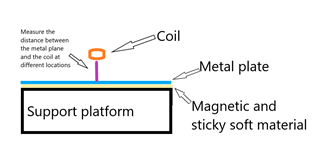
- There is a soft magnetic sticker under my metal plane to be measured, which is used to fix the metal plate, as shown in the picture. Will this soft magnetic sticker affect the LDC1612 measurement?
- Since the coil needs to be fixed, is there any metal that will not interfere with the LDC1612 measurement?
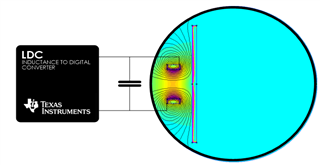
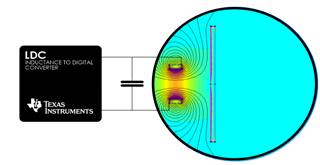
- Is there any requirement for the angle between the coil and the metal plane to be measured? Parallel is the best choice, but in reality there will be an inclination between the two?
- In order to reduce the impact of temperature on LDC1612, I use a temperature sensor to measure the temperature of the coil, and then design a compensation algorithm. How should I design a compensation algorithm?
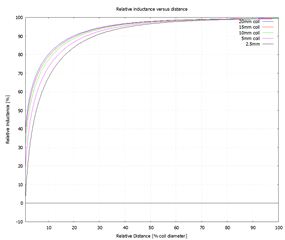
- Since the metal plane has boundaries, measuring the center and edge of the metal plane should be different. Is there any way to resolve this difference?
A strange question:
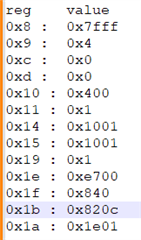
- I found that when using LDC1612 to measure the height values of different areas and coils, there will always be a large error in a certain area (such as the upper left corner). The voltage Vosc at both ends of the coil has been confirmed to be between 1.2V~1.8V. What may be the cause?
Looking forward to your reply.
Thank you.