


Other Parts Discussed in Thread: TMAG5173-Q1, , TMAG3001, TMAG5273
Hello,
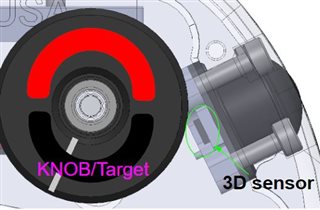
I am designing a rotary knob and would like to use a 3D Hall Effect Sensor. The knob is used to control variable speed of a motor. I am currently using a potentiometer but looking to refine my design/assembly.
Mechanically the knob will be limited between 0~300 degrees. I plan to use a diametric ring magnet attached to the knob. The target will likely be off the center axis of the target and a few mm off the face of the sensor. Attached is a screen of a rough layout. I plan to test different targets and mechanical positions to determine what works for my system requirements.
Is the TMAG 5170 the sensor I should be looking at or do you have other suggestions? Ideally I can use a dev kit to easily test/verify the design before developing my integrated solution - do you have recommendations for this?
Regards
