- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
Tool/software:
Hello,
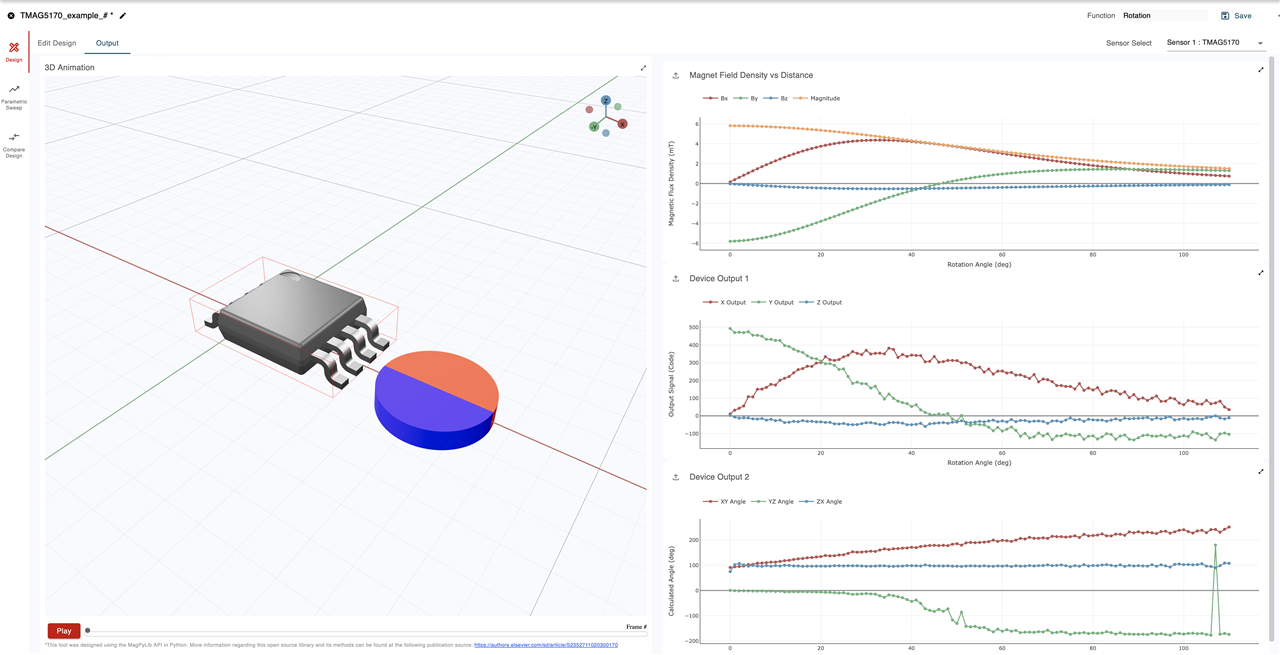
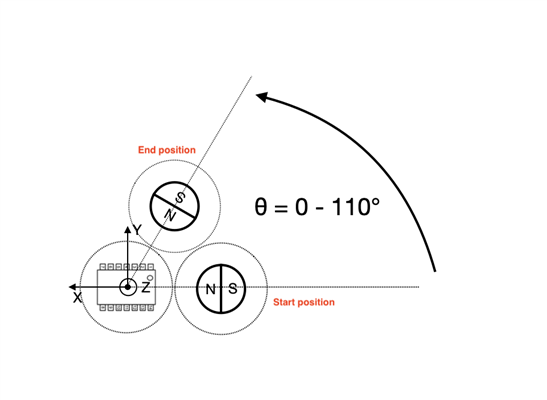
I'm looking to use this sensor for off-axis measurement and I'm planning to use cylindrical magnet (radial flux) NdFeB, Br = 1320mT, 3x0.6mm.
I see that the sensor saturates at +/-300mT so I need to know how far from the sensor I need to put the magnet? Do you have any tool that helps calculating this?
Thanks,
Milos





 Best,
Best,