Other Parts Discussed in Thread: DCA1000EVM, IWR6843AOP
Tool/software:
Hello TI team,
We are evaluating the IWR6843AOPEVM for static presence detection and accurate coordinate tracking within a 15' x 15' room. Initial testing has been conducted using the 3D People Tracking binary with the default configuration. However, we have encountered the following issues:
-
Accuracy and Reliability of Coordinates: The reported coordinates occasionally show inaccuracies, and the reliability of the detected positions needs improvement.
-
Static Person Detection: The radar often fails to detect a person when they remain static for an extended period.
-
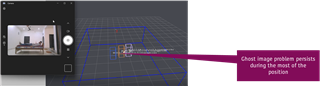
Ghost Images: The issue of ghost images persists during testing, leading to erroneous detections.
-
Decreased Data for Static Targets: When a person becomes static, we observe a decrease in the number of detected objects on the UART output, indicating fewer processed data points from the radar.
-
Maximizing Point Cloud Detection: What specific parameters in the configuration (CFG) file should be adjusted to maximize the number of point cloud data points detected and reported over the UART?
- Binary for Raw Data in Spherical Coordinates: Which binary should be used to obtain the maximum raw data (point cloud data) in spherical coordinate format with minimal processing.
- Disabling Grouping by Range and Doppler: How can I disable grouping by range and Doppler for the cloud points using configuration parameters only, to maximize the point cloud data reported on the UART?
We would appreciate your guidance on resolving these issues to improve the accuracy, reliability, and overall performance of the radar for our application.
Regards & Thankyou
Dileep Sharma