Other Parts Discussed in Thread: DCA1000EVM,
Tool/software:
Hi Team,
I have some questions about the angle estimation from the raw data.
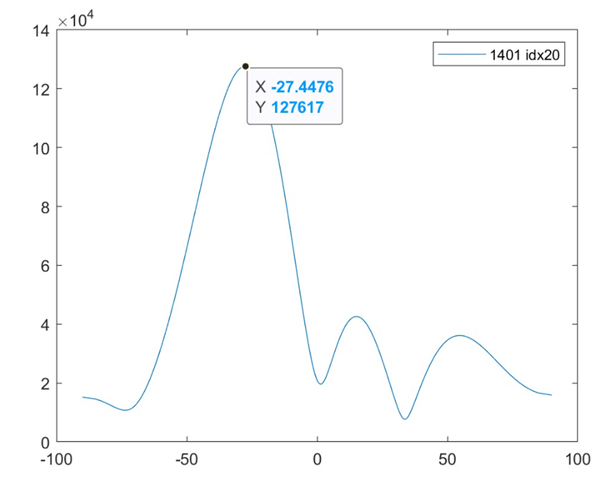
As the figure shows, I measured a corner reflector on the left hand of the radar.

However, when I did angle FFT (513 points) on the corresponding range bin, I got the peak at the negative angle, as the figure shows.
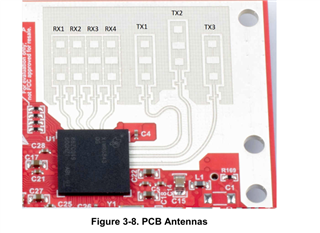
But the antenna arrangement is shown as this figure, so that means when we see the radar board from the back, the antenna layout should be RX4-RX3-RX2-RX1, which also means that I should expect the peak of the Angle FFT appears on the positive angle instead of the negative angle.
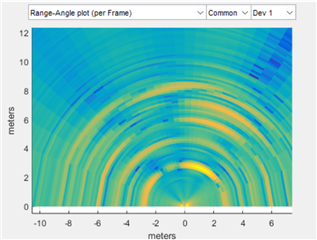
Moreover, when I observed the heatmap from the mmWave studio, we can also see that the strong reflection from the right hand side, which is contradictory to the placement of the corner reflector. And I also checked the MATLAB example, if I calculate the x,y,z coordinate, then I will get the similar thing as the mmWave Studio shows.
if length(angleEst) > 0
for iobj = 1:length(angleEst)
angles_all_points (iobj,1:2)=angleEst(iobj).angles(1:2);
angles_all_points (iobj,3)=angleEst(iobj).estSNR;
angles_all_points (iobj,4)=angleEst(iobj).rangeInd;
angles_all_points (iobj,5)=angleEst(iobj).doppler_corr;
angles_all_points (iobj,6)=angleEst(iobj).range;
%switch left and right, the azimuth angle is flipped
xyz(iobj,1) = angles_all_points (iobj,6)*sind(angles_all_points (iobj,1)*-1)*cosd(angles_all_points (iobj,2));
xyz(iobj,2) = angles_all_points (iobj,6)*cosd(angles_all_points (iobj,1)*-1)*cosd(angles_all_points (iobj,2));
%switch upside and down, the elevation angle is flipped
xyz(iobj,3) = angles_all_points (iobj,6)*sind(angles_all_points (iobj,2)*-1);
xyz(iobj,4) = angleEst(iobj).doppler_corr;
xyz(iobj,9) = angleEst(iobj).dopplerInd_org;
xyz(iobj,5) = angleEst(iobj).range;
xyz(iobj,6) = angleEst(iobj).estSNR;
xyz(iobj,7) = angleEst(iobj).doppler_corr_overlap;
xyz(iobj,8) = angleEst(iobj).doppler_corr_FFT;
end
Actually I went through almost every thread regarding the same issue, for example,
https://e2e.ti.com/support/sensors-group/sensors/f/sensors-forum/926713/awr1443boost-aoa-estimation
But none of them gives a concrete answer to the question regarding the reverse angles.
Also, I am confused about the training video about Angle FFT (www.ti.com/.../5415560018001, the graph doesn't match well with the text, when the objects to the left of the radar, the graph shows that ω is smaller than 0.

To conclude, my questions are,
How should I understand the mapping of channel 1,2,3,4 to RX1,2,3,4?
And what is the correct way to differentiate the negative and positive angles when I am doing Angle estimation?
I am really looking forward to your response! Thanks in advance!
Best,
Bei