Other Parts Discussed in Thread: IWRL6432AOP, UNIFLASH, MMWAVE-L-SDK, IWRL6432, SYSCONFIG
Tool/software:
Hello friends, I have purchased the IWRL6432AOPEVM radar board. My goal is to get the data of distance, presence, motion etc. to a host MCU through UART communication and parse it . I have some questions as following:
- Which are the UART terminals on the Board IWRL6432AOPEVM where I can connect the Host MCU's UART pins to receive the data to the host MCU or any serial terminal to the PC ?
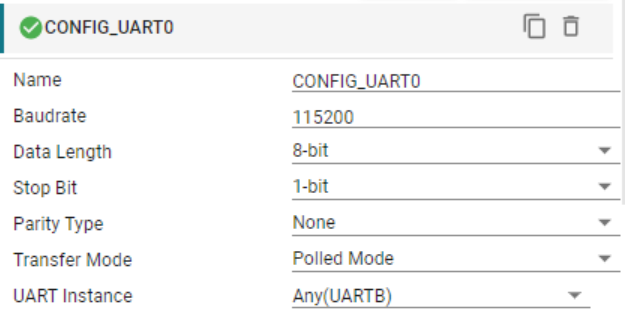
- What are the default configurations of the UART of IWRL6432AOPEVM in terms of Data Bits per packet, Parity and stop bits and use of RTS and CTS?
- Do we start getting the data on UART terminal as a continuous stream after powering the Board IWRL6432AOPEVM or is can we enable or disable it as per our choice?
- How can we change the baud rate of the UART communication? Does the same baud rate is used to send the data to GUI as well?
- How can we control the start and stop operation of radar sensor so that we could save the power and enable the sensing only when required (usually periodic).
- It was mentioned in the document on this link > "software-dl.ti.com/.../MOTION_AND_PRESENCE_DETECTION_DEMO.html the frame header size is 52 bytes but after calculating the size of the frame header structure(MmwDemo_output_message_header_t) and even adding the TLV structure(MmwDemo_output_message_tl_t) size does not gets equal to 52 bytes, Is it that some data fields are not mentioned or something else is the reason?
I would be really grateful for your support.
Thank You.