


Part Number: LP-EM-CC1354P10
Other Parts Discussed in Thread: SYSCONFIG
- CCS Version 12.3.0
- SDK Version simplelink_cc13xx_cc26xx_sdk_7_10_00_98
I'm working with a customer that is building their application external to CCS (not a CCS managed project). They are then manually creating a target configuration and loading that external application (*.out in ELF format, built using GCC) to their connected target in CCS.
At this point, they open the Tools -> Runtime Object View, except that it does not show all the FreeRTOS related modules we would expect. Instead, all it shows is this:
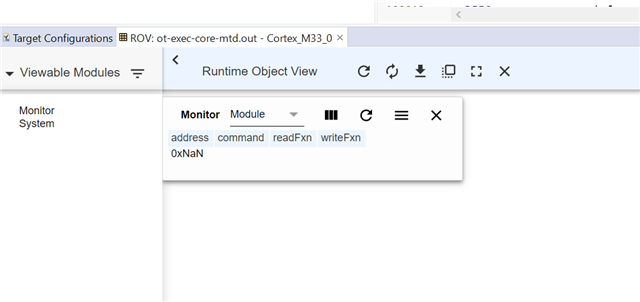
The externally built project does include SysConfig, and is generating a sysconfig_c.rov.xs file. We subsequently found the following instruction:
https://software-dl.ti.com/ccs/esd/documents/rov_guide/html/src/rov.html#controlling-the-module-list
Note: ROV finds the list of modules by examining the <code>.rov.xs</code> file on the host. When you build a TI-RTOS application, this file is generated automatically in a subdirectory of the application’s configuration project tree. If you specified a path to the executable when connecting to ROV (rather than using the program currently being debugged in CCS), ROV looks for the <code>.rov.xs</code> file in the same directory that contains the executable and in the <code>configPkg/package/cfg</code> subdirectory
However, these instructions do not appear to actually work. We've tried without success. Are we missing something?
Thanks,
Stuart
