


Tool/software:
A simple question with regard to the code-composer studio example <single_chip_servo_am243x-lp_r5fss0-0_nortos_ti-arm-clang>:
In Design Guide TIDEP-01032 ("EtherCAT® Connected, Single-Chip, Dual-Servo Motor Drive Reference Design"), CiA402 (EtherCAT Profile for Drives and Motion Control) profile is mentioned as drive profile used to communicate between AM243x and Beckhoff TwinCAT.
In "settings.h" of the <single_chip_servo_am243x-lp_r5fss0-0_nortos_ti-arm-clang> example code, "CLOSED_LOOP_SPEED" is the buildlevel default.
I found that "CLOSED_LOOP_SPEED" buildlevel setting is working ok, as described in Design Guide TIDEP-01032.

BUT:
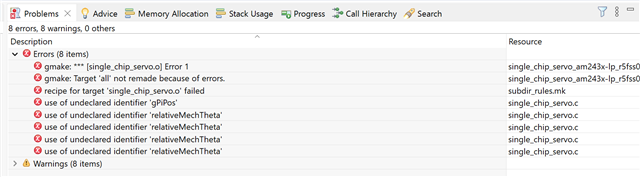
What is the buildlevel setting "CLOSED_LOOP_CIA402" for? When activating this buildlevel setting (by uncommenting it, commenting out all other buildlevel settings), the code won't compile without a number of error messages:
For my better understanding:
What is buildlevel "CLOSED_LOOP_CIA402" in "setting.h" of <single_chip_servo_am243x-lp_r5fss0-0_nortos_ti-arm-clang> there for?
Why do I receive compiler errors, when trying to compile the code with that setting? Am I doing something wrong, or is that buildlevel setting some kind of unfinished "work in progress" within the example code development @ TI ?
Thank you.

