Other Parts Discussed in Thread: TL431, OPA322-Q1
Hello all,
 I'm designing a resolver circuit for motor control, according to the reference design "TIDA01527" I have several questions.
I'm designing a resolver circuit for motor control, according to the reference design "TIDA01527" I have several questions.
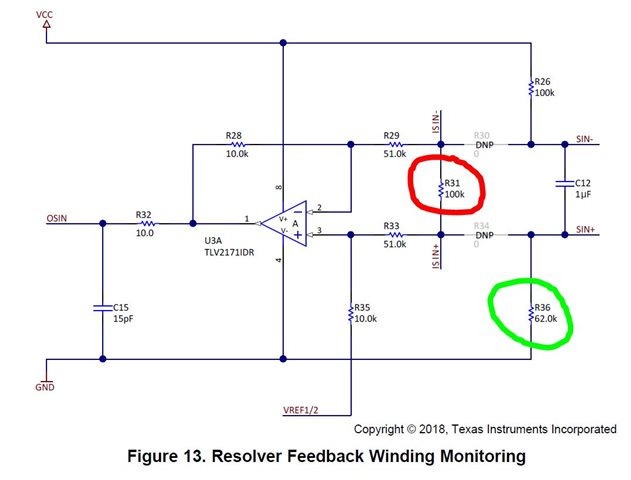
Question 1: Why the DC biasing resistor R36 = 62k, why not the same like R31 and R 26 = 100k?
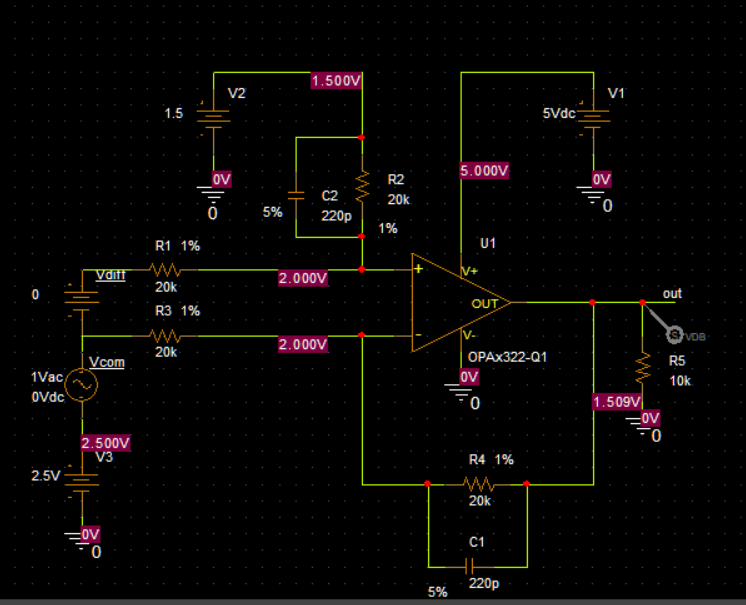
Question 2: In this case, the resolver feedback winding runs very small current, shouldn't we increase the load current of the resolver feedback winding so that it may get more noise-resistance? For example, we want to reduce the R31 to 1k, to let the resolver feedback winding runs a litter bit more current like over 1mA.. (see our design below)
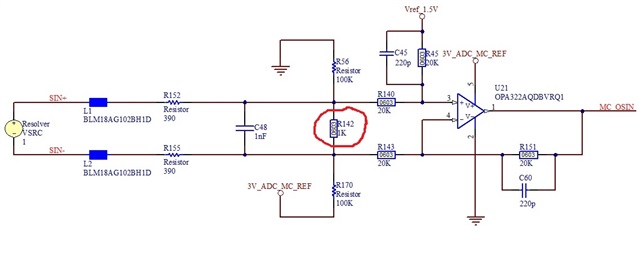
So what do you think is this a good idea or just superfluous?
I would be very grateful if you guys could help! Thanks you!
BR
Jin
Jin