Other Parts Discussed in Thread: SYSCONFIG, CC1314R10, CC1354P10, LP-XDS110ET
Tool/software:
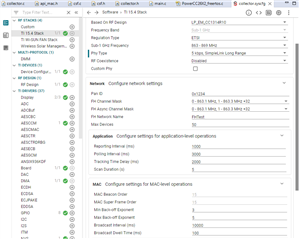
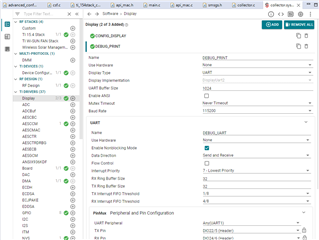
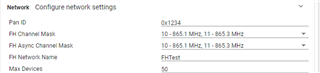
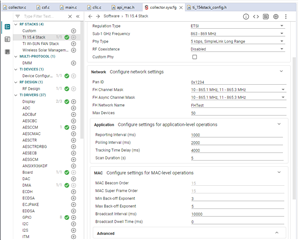
Hi, I'm trying to work with LP-EM-CC1314R10 multiple RF transmitters and a single receiver. Is there any possible way to receive from multiple transmitters without payload loss at the RF receiver end and how to implement configurations for both transmitter and receiver to achieve the scenario?