Dear all,
I want to use an ADC Channel to read a voltage with the sensor controller. I modified the Sensor Controlller example "ADC window Monitor" and debugged it and it works fine.
Then I tried to implement it to my CCS Project for the my device application. Therfore I generated a new Task:
void sensorsontrollerTask_Init (void)
{
Task_Params_init(&sensorsontrollerTask_Params);
sensorsontrollerTask_Params.stackSize = 512;
sensorsontrollerTask_Params.stack = &sensorsontrollerTask_Stack;
Task_create((Task_FuncPtr)sensorsontrollerTask,&sensorsontrollerTask_Params,Error_ABORT);
}
where I init the Sensor controller Task:
void sensorsontrollerTask (UArg Arg)
{
// Initialize the SCIF operating system abstraction layer
scifOsalInit();
scifOsalRegisterCtrlReadyCallback(scCtrlReadyCallback);
scifOsalRegisterTaskAlertCallback(scTaskAlertCallback);
// Initialize the SCIF driver
scifInit(&scifDriverSetup);
// Enable RTC ticks, with 100 Hz tick interval
scifStartRtcTicksNow(0x00010000 / 100);
// Start the "ADC Window Monitor" Sensor Controller task
scifStartTasksNbl(1 << SCIF_ADC_WINDOW_MONITOR_TASK_ID);
while (1)
{
Task_sleep(100); // sleep for 1ms
}
}
After the init the scCtrlReadyCallback is called.
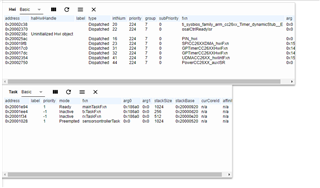
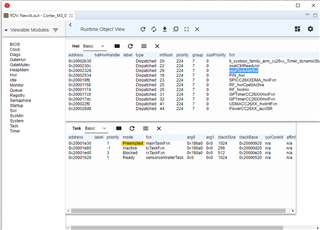
Then after some seconds the firmware crashes. If I do not start the Sensorcontroller, the rest of my application works fine.
BR Noge
SensorController_JA.c
/*
* SensorController_JA.c
*
* Created on: 13.04.2021
* Author: E9601483
*/
#include <stdbool.h>
#include <stdint.h>
#include <ti/sysbios/knl/Semaphore.h>
#include <ti/sysbios/knl/Task.h>
#include <xdc/runtime/Error.h>
#include <ti/drivers/PIN.h>
#include <ti/sysbios/BIOS.h>
#include <xdc/runtime/Error.h>
#include "scif.h"
#include "scif_osal_tirtos.h"
void sensorsontrollerTask (UArg Arg);
static char sensorsontrollerTask_Stack[512];
static Task_Params sensorsontrollerTask_Params;
static Task_Struct sensorsontrollerTask_Struct;
#if defined(__IAR_SYSTEMS_ICC__)
__task
#elif defined(__TI_COMPILER_VERSION__)
#pragma TASK( sensorsontrollerTask )
#endif
// SCIF driver callback: Task control interface ready (non-blocking task control operation completed)
void scCtrlReadyCallback(void) {
scifClearAlertIntSource();
uint16_t uintADCvalue = scifTaskData.adcWindowMonitor.output.adcValue;
scifAckAlertEvents();
}
// SCIF driver callback: Sensor Controller task code has generated an alert interrupt
void scTaskAlertCallback(void) {
scifClearAlertIntSource();
uint16_t uintADCvalue = scifTaskData.adcWindowMonitor.output.adcValue;
scifAckAlertEvents();
}
void sensorsontrollerTask_Init (void)
{
Task_Params_init(&sensorsontrollerTask_Params);
sensorsontrollerTask_Params.stackSize = 512;
sensorsontrollerTask_Params.stack = &sensorsontrollerTask_Stack;
Task_create((Task_FuncPtr)sensorsontrollerTask,&sensorsontrollerTask_Params,Error_ABORT);
}
void sensorsontrollerTask (UArg Arg)
{
// Initialize the SCIF operating system abstraction layer
scifOsalInit();
scifOsalRegisterCtrlReadyCallback(scCtrlReadyCallback);
scifOsalRegisterTaskAlertCallback(scTaskAlertCallback);
// Initialize the SCIF driver
scifInit(&scifDriverSetup);
// Enable RTC ticks, with 100 Hz tick interval
scifStartRtcTicksNow(0x00010000 / 100);
// Start the "ADC Window Monitor" Sensor Controller task
scifStartTasksNbl(1 << SCIF_ADC_WINDOW_MONITOR_TASK_ID);
while (1)
{
Task_sleep(100); // sleep for 1ms
}
}