Hi all:
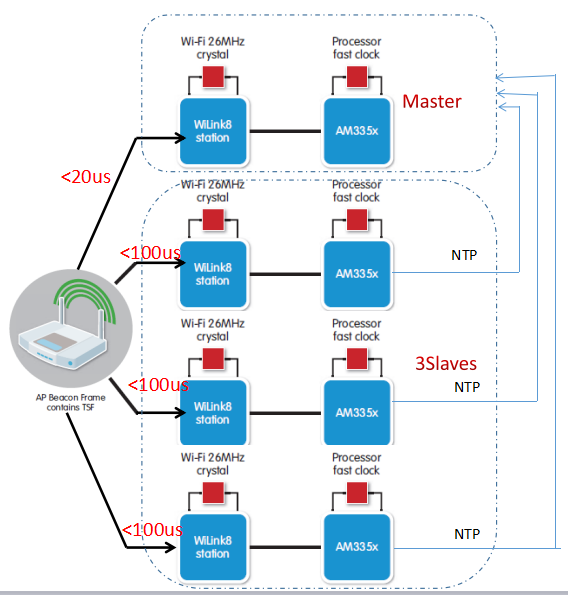
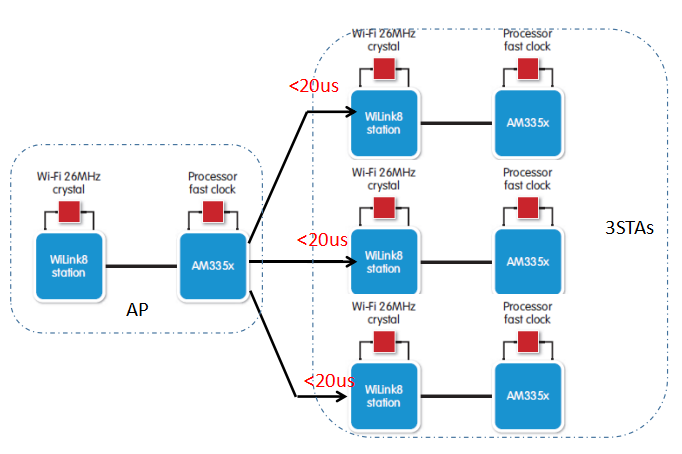
I am using wl1837 to do some tests, mainly want to evaluate its clock sync feature; my goal is to get the time offset value between Sta and AP; the document says wilink8 can accomplishes a time accuracy of less than 20 μsec between devices connected to the same AP/Router.
I have two wireless devices;
D1: AM57x-EVM + WL1837MODCOM8I
D2: Freescale imx6qp-sabresd + WL18xxCOM82SDMMC(adaptor card) + WL1837MODCOM8I
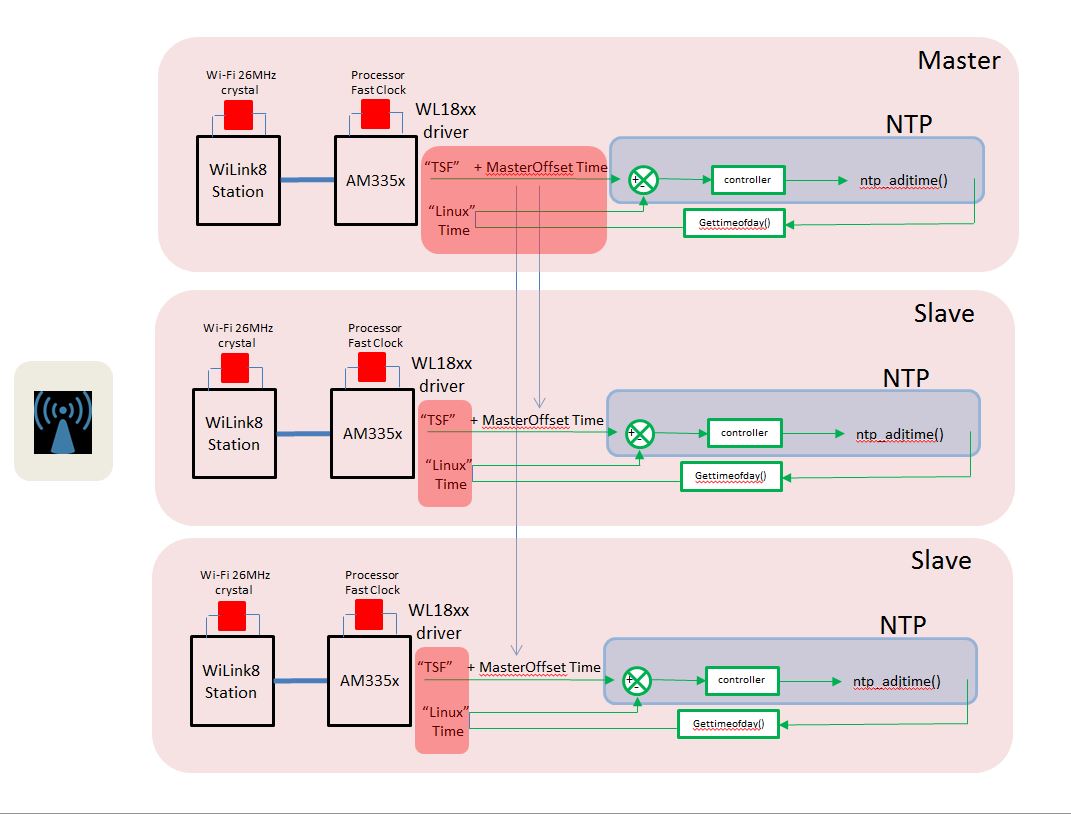
I want to sync above two wireless devices, I use below link as a reference
I only need to implement the ap and master sta as the link says;
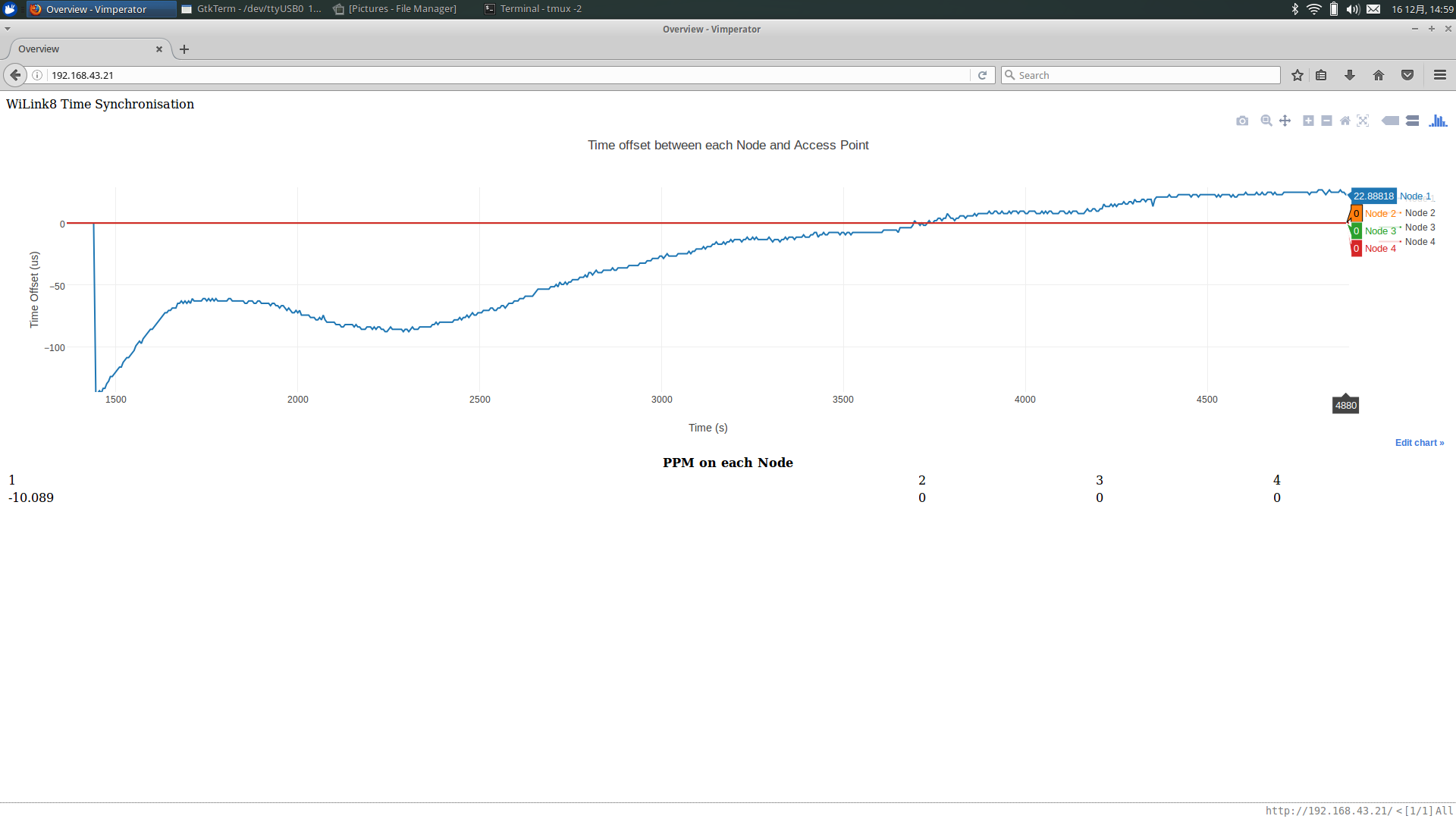
but the time offset between two devices is tens of milliseconds; it seems that the time sync feature did not be enabled;
i don't know what's wrong,can someone provide me some guide to make the time sync feature work;
thank you very much(BTW: if needed ,i will provided my detailed implementation process )