


Part Number: CC2652P
Other Parts Discussed in Thread: SYSCONFIG
Hi, I use CC2652P, simplelink_cc13x2_26x2_sdk_4_40_04_04, CCS10.2
I tested latency between interrupt signal and irq callback using a key and a led.
The code is as below:
GPIO_setCallback(gpio_key1, gpio_key1_isr);
GPIO_enableInt(gpio_key1);
void gpio_key1_isr(uint8_t index)
{
led_1_on();
}
The key signal waveform and led waveform is as below:
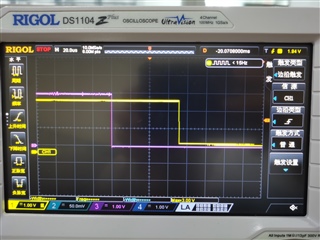
In the picture, the red waveform is key signal and the yellow waveform is led signal.
And we can see, there is a long latency about 70us between key signal and led signal, which means when a hardware signal changes, there will be a 70us latency before the irq callback runs.
How can I minimal this latency please? 70us is really too long.



