


Hello,
I have a ADS1256 that I would like to interface via SPI to the microcontroller STM32F107RCT6.
I wrote the driver, but still can't get right result of conversion.
First of all, my schematic:
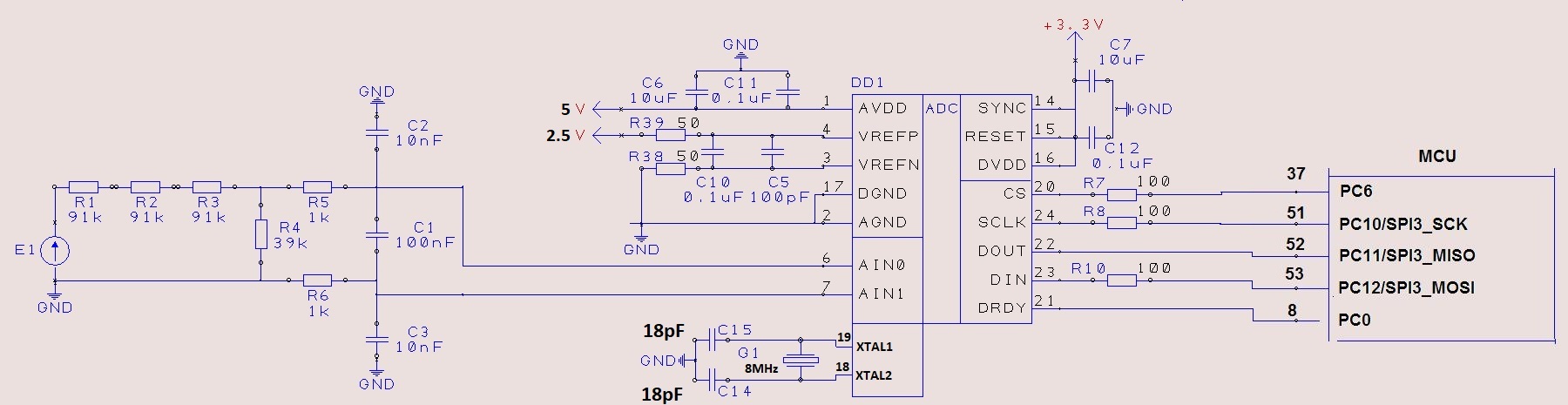
R1-R4 is voltage divider with coef. 8.
R5-R6 & C1-C3 - antialiasing filter.
Other elements are in accordance with datasheet.
SPI and MCU config:

And driver code:
/**
******************************************************************************
* File Name : main.c
* Description : Main program body
******************************************************************************
** This notice applies to any and all portions of this file
* that are not between comment pairs USER CODE BEGIN and
* USER CODE END. Other portions of this file, whether
* inserted by the user or by software development tools
* are owned by their respective copyright owners.
*
* COPYRIGHT(c) 2018 STMicroelectronics
*
* Redistribution and use in source and binary forms, with or without modification,
* are permitted provided that the following conditions are met:
* 1. Redistributions of source code must retain the above copyright notice,
* this list of conditions and the following disclaimer.
* 2. Redistributions in binary form must reproduce the above copyright notice,
* this list of conditions and the following disclaimer in the documentation
* and/or other materials provided with the distribution.
* 3. Neither the name of STMicroelectronics nor the names of its contributors
* may be used to endorse or promote products derived from this software
* without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
* IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE
* DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE
* FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL
* DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR
* SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
* CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY,
* OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
* OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "stm32f1xx_hal.h"
#include "stdio.h"
/* USER CODE BEGIN Includes */
#define CS_ON() HAL_GPIO_WritePin(CS_GPIO_Port, CS_Pin, GPIO_PIN_RESET) // Enable CS
#define CS_OFF() HAL_GPIO_WritePin(CS_GPIO_Port, CS_Pin, GPIO_PIN_SET) // Disable CS
/* USER CODE END Includes */
/* Private variables ---------------------------------------------------------*/
SPI_HandleTypeDef hspi3;
/* USER CODE BEGIN PV */
/* Private variables ---------------------------------------------------------*/
uint8_t spiTxBuf[10], spiRxBuf[3]; // Transmit and receive buffers
int32_t result; // Variable for conversion result
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_SPI3_Init(void);
/* USER CODE BEGIN PFP */
/* Private function prototypes -----------------------------------------------*/
/* USER CODE END PFP */
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration----------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_SPI3_Init();
/* USER CODE BEGIN 2 */
CS_ON(); // Enable CS
spiTxBuf[0]=0xFE; // Set RESET command address
HAL_SPI_Transmit(&hspi3, spiTxBuf, 1, 50); // Transmit buffer via SPI
CS_OFF(); // Disable CS
CS_ON(); // Enable CS
spiTxBuf[0]=0x0F; // Set SDATAC command address
HAL_SPI_Transmit(&hspi3, spiTxBuf, 1, 50); // Transmit buffer via SPI
CS_OFF(); // Disable CS
CS_ON(); // Enable CS
spiTxBuf[0]=0x50; // Set WREG command address + address of STATUS register
HAL_SPI_Transmit(&hspi3, spiTxBuf, 1, 50); // Transmit buffer via SPI
spiTxBuf[0]=3; // Set number of registers to be written
HAL_SPI_Transmit(&hspi3, spiTxBuf, 1, 50); // Transmit buffer via SPI
spiTxBuf[0]=0x00; // STATUS - MSB; Disable auto-calibration; Disable buffer; DRDY
spiTxBuf[1]=0x01; // MUX - AIN0 as POSITIVE, AIN1 as NEGATIVE
spiTxBuf[2]=0x00; // ADCON - Clock out disable; Sensor detect disable; PGA = 1
spiTxBuf[3]=0xF0; // DRATE - 30000 SPS
HAL_SPI_Transmit(&hspi3, spiTxBuf, 4, 50); // Transmit buffer via SPI
CS_OFF(); // Disable CS
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
CS_ON(); // Enable CS
spiTxBuf[0]=0xFC; // Set SYNC command address
HAL_SPI_Transmit(&hspi3, spiTxBuf, 1, 50); // Transmit buffer via SPI
CS_OFF(); // Disable CS
CS_ON(); // Enable CS
spiTxBuf[0]=0x00; // Set WAKEUP command address
HAL_SPI_Transmit(&hspi3, spiTxBuf, 1, 50);
CS_OFF(); // Disable CS
CS_ON(); // Enable CS
spiTxBuf[0]=0x01; // Set RDATA command address
HAL_SPI_Transmit(&hspi3, spiTxBuf, 1, 50); // Transmit buffer via SPI
HAL_Delay(1); // Delay 1 ms
HAL_SPI_Receive(&hspi3, spiRxBuf, 3, 50); // Receive result of conversion via SPI
CS_OFF(); // Disable CS
result = spiRxBuf[0];
result = result << 8;
result = spiRxBuf[1];
result = result << 8;
result = spiRxBuf[2];
HAL_Delay(100);
}
/* USER CODE END 3 */
}
/** System Clock Configuration
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct;
RCC_ClkInitTypeDef RCC_ClkInitStruct;
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV5;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.Prediv1Source = RCC_PREDIV1_SOURCE_PLL2;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
RCC_OscInitStruct.PLL2.PLL2State = RCC_PLL2_ON;
RCC_OscInitStruct.PLL2.PLL2MUL = RCC_PLL2_MUL8;
RCC_OscInitStruct.PLL2.HSEPrediv2Value = RCC_HSE_PREDIV2_DIV5;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
/**Configure the Systick interrupt time
*/
HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/1000);
/**Configure the Systick
*/
HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);
/**Configure the Systick interrupt time
*/
__HAL_RCC_PLLI2S_ENABLE();
/* SysTick_IRQn interrupt configuration */
HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0);
}
/* SPI3 init function */
static void MX_SPI3_Init(void)
{
/* SPI3 parameter configuration*/
hspi3.Instance = SPI3;
hspi3.Init.Mode = SPI_MODE_MASTER;
hspi3.Init.Direction = SPI_DIRECTION_2LINES;
hspi3.Init.DataSize = SPI_DATASIZE_8BIT;
hspi3.Init.CLKPolarity = SPI_POLARITY_HIGH;
hspi3.Init.CLKPhase = SPI_PHASE_1EDGE;
hspi3.Init.NSS = SPI_NSS_SOFT;
hspi3.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_32;
hspi3.Init.FirstBit = SPI_FIRSTBIT_MSB;
hspi3.Init.TIMode = SPI_TIMODE_DISABLE;
hspi3.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
hspi3.Init.CRCPolynomial = 10;
if (HAL_SPI_Init(&hspi3) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
}
/** Configure pins as
* Analog
* Input
* Output
* EVENT_OUT
* EXTI
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(CS_GPIO_Port, CS_Pin, GPIO_PIN_SET);
/*Configure GPIO pin : CS_Pin */
GPIO_InitStruct.Pin = CS_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(CS_GPIO_Port, &GPIO_InitStruct);
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @param None
* @retval None
*/
void _Error_Handler(char * file, int line)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
while(1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t* file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif
/**
* @}
*/
/**
* @}
*/
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
Code of HAL_SPI_Transmit:
/**
* @brief Transmit an amount of data in blocking mode
* @param hspi: pointer to a SPI_HandleTypeDef structure that contains
* the configuration information for SPI module.
* @param pData: pointer to data buffer
* @param Size: amount of data to be sent
* @param Timeout: Timeout duration
* @retval HAL status
*/
HAL_StatusTypeDef HAL_SPI_Transmit(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size, uint32_t Timeout)
{
if(hspi->State == HAL_SPI_STATE_READY)
{
if((pData == NULL ) || (Size == 0))
{
return HAL_ERROR;
}
/* Check the parameters */
assert_param(IS_SPI_DIRECTION_2LINES_OR_1LINE(hspi->Init.Direction));
/* Process Locked */
__HAL_LOCK(hspi);
/* Configure communication */
hspi->State = HAL_SPI_STATE_BUSY_TX;
hspi->ErrorCode = HAL_SPI_ERROR_NONE;
hspi->pTxBuffPtr = pData;
hspi->TxXferSize = Size;
hspi->TxXferCount = Size;
/*Init field not used in handle to zero */
hspi->TxISR = 0;
hspi->RxISR = 0;
hspi->pRxBuffPtr = NULL;
hspi->RxXferSize = 0;
hspi->RxXferCount = 0;
/* Reset CRC Calculation */
if(hspi->Init.CRCCalculation == SPI_CRCCALCULATION_ENABLE)
{
SPI_RESET_CRC(hspi);
}
if(hspi->Init.Direction == SPI_DIRECTION_1LINE)
{
/* Configure communication direction : 1Line */
SPI_1LINE_TX(hspi);
}
/* Check if the SPI is already enabled */
if((hspi->Instance->CR1 &SPI_CR1_SPE) != SPI_CR1_SPE)
{
/* Enable SPI peripheral */
__HAL_SPI_ENABLE(hspi);
}
/* Transmit data in 8 Bit mode */
if(hspi->Init.DataSize == SPI_DATASIZE_8BIT)
{
if((hspi->Init.Mode == SPI_MODE_SLAVE)|| (hspi->TxXferCount == 0x01))
{
hspi->Instance->DR = (*hspi->pTxBuffPtr++);
hspi->TxXferCount--;
}
while(hspi->TxXferCount > 0)
{
/* Wait until TXE flag is set to send data */
if(SPI_WaitOnFlagUntilTimeout(hspi, SPI_FLAG_TXE, RESET, Timeout) != HAL_OK)
{
return HAL_TIMEOUT;
}
hspi->Instance->DR = (*hspi->pTxBuffPtr++);
hspi->TxXferCount--;
}
/* Enable CRC Transmission */
if(hspi->Init.CRCCalculation == SPI_CRCCALCULATION_ENABLE)
{
SET_BIT(hspi->Instance->CR1, SPI_CR1_CRCNEXT);
}
}
/* Transmit data in 16 Bit mode */
else
{
if((hspi->Init.Mode == SPI_MODE_SLAVE) || (hspi->TxXferCount == 0x01))
{
hspi->Instance->DR = *((uint16_t*)hspi->pTxBuffPtr);
hspi->pTxBuffPtr+=2;
hspi->TxXferCount--;
}
while(hspi->TxXferCount > 0)
{
/* Wait until TXE flag is set to send data */
if(SPI_WaitOnFlagUntilTimeout(hspi, SPI_FLAG_TXE, RESET, Timeout) != HAL_OK)
{
return HAL_TIMEOUT;
}
hspi->Instance->DR = *((uint16_t*)hspi->pTxBuffPtr);
hspi->pTxBuffPtr+=2;
hspi->TxXferCount--;
}
/* Enable CRC Transmission */
if(hspi->Init.CRCCalculation == SPI_CRCCALCULATION_ENABLE)
{
SET_BIT(hspi->Instance->CR1, SPI_CR1_CRCNEXT);
}
}
/* Wait until TXE flag is set to send data */
if(SPI_WaitOnFlagUntilTimeout(hspi, SPI_FLAG_TXE, RESET, Timeout) != HAL_OK)
{
SET_BIT(hspi->ErrorCode, HAL_SPI_ERROR_FLAG);
return HAL_TIMEOUT;
}
/* Wait until Busy flag is reset before disabling SPI */
if(SPI_WaitOnFlagUntilTimeout(hspi, SPI_FLAG_BSY, SET, Timeout) != HAL_OK)
{
SET_BIT(hspi->ErrorCode, HAL_SPI_ERROR_FLAG);
return HAL_TIMEOUT;
}
/* Clear OVERUN flag in 2 Lines communication mode because received is not read */
if(hspi->Init.Direction == SPI_DIRECTION_2LINES)
{
__HAL_SPI_CLEAR_OVRFLAG(hspi);
}
hspi->State = HAL_SPI_STATE_READY;
/* Process Unlocked */
__HAL_UNLOCK(hspi);
return HAL_OK;
}
else
{
return HAL_BUSY;
}
}
Code of HAL_SPI_Receive:
/**
* @brief Receive an amount of data in blocking mode.
* @param hspi: pointer to a SPI_HandleTypeDef structure that contains
* the configuration information for SPI module.
* @param pData: pointer to data buffer
* @param Size: amount of data to be received
* @param Timeout: Timeout duration
* @retval HAL status
*/
HAL_StatusTypeDef HAL_SPI_Receive(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size, uint32_t Timeout)
{
#if (USE_SPI_CRC != 0U)
__IO uint16_t tmpreg = 0U;
#endif /* USE_SPI_CRC */
uint32_t tickstart = 0U;
HAL_StatusTypeDef errorcode = HAL_OK;
if((hspi->Init.Mode == SPI_MODE_MASTER) && (hspi->Init.Direction == SPI_DIRECTION_2LINES))
{
hspi->State = HAL_SPI_STATE_BUSY_RX;
/* Call transmit-receive function to send Dummy data on Tx line and generate clock on CLK line */
return HAL_SPI_TransmitReceive(hspi,pData,pData,Size,Timeout);
}
/* Process Locked */
__HAL_LOCK(hspi);
/* Init tickstart for timeout management*/
tickstart = HAL_GetTick();
if(hspi->State != HAL_SPI_STATE_READY)
{
errorcode = HAL_BUSY;
goto error;
}
if((pData == NULL ) || (Size == 0U))
{
errorcode = HAL_ERROR;
goto error;
}
/* Set the transaction information */
hspi->State = HAL_SPI_STATE_BUSY_RX;
hspi->ErrorCode = HAL_SPI_ERROR_NONE;
hspi->pRxBuffPtr = (uint8_t *)pData;
hspi->RxXferSize = Size;
hspi->RxXferCount = Size;
/*Init field not used in handle to zero */
hspi->pTxBuffPtr = (uint8_t *)NULL;
hspi->TxXferSize = 0U;
hspi->TxXferCount = 0U;
hspi->RxISR = NULL;
hspi->TxISR = NULL;
#if (USE_SPI_CRC != 0U)
/* Reset CRC Calculation */
if(hspi->Init.CRCCalculation == SPI_CRCCALCULATION_ENABLE)
{
SPI_RESET_CRC(hspi);
/* this is done to handle the CRCNEXT before the latest data */
hspi->RxXferCount--;
}
#endif /* USE_SPI_CRC */
/* Configure communication direction: 1Line */
if(hspi->Init.Direction == SPI_DIRECTION_1LINE)
{
SPI_1LINE_RX(hspi);
}
/* Check if the SPI is already enabled */
if((hspi->Instance->CR1 & SPI_CR1_SPE) != SPI_CR1_SPE)
{
/* Enable SPI peripheral */
__HAL_SPI_ENABLE(hspi);
}
/* Receive data in 8 Bit mode */
if(hspi->Init.DataSize == SPI_DATASIZE_8BIT)
{
/* Transfer loop */
while(hspi->RxXferCount > 0U)
{
/* Check the RXNE flag */
if(__HAL_SPI_GET_FLAG(hspi, SPI_FLAG_RXNE))
{
/* read the received data */
(* (uint8_t *)pData)= *(__IO uint8_t *)&hspi->Instance->DR;
pData += sizeof(uint8_t);
hspi->RxXferCount--;
}
else
{
/* Timeout management */
if((Timeout == 0U) || ((Timeout != HAL_MAX_DELAY) && ((HAL_GetTick()-tickstart) >= Timeout)))
{
errorcode = HAL_TIMEOUT;
goto error;
}
}
}
}
else
{
/* Transfer loop */
while(hspi->RxXferCount > 0U)
{
/* Check the RXNE flag */
if(__HAL_SPI_GET_FLAG(hspi, SPI_FLAG_RXNE))
{
*((uint16_t*)pData) = hspi->Instance->DR;
pData += sizeof(uint16_t);
hspi->RxXferCount--;
}
else
{
/* Timeout management */
if((Timeout == 0U) || ((Timeout != HAL_MAX_DELAY) && ((HAL_GetTick()-tickstart) >= Timeout)))
{
errorcode = HAL_TIMEOUT;
goto error;
}
}
}
}
#if (USE_SPI_CRC != 0U)
/* Handle the CRC Transmission */
if(hspi->Init.CRCCalculation == SPI_CRCCALCULATION_ENABLE)
{
/* freeze the CRC before the latest data */
SET_BIT(hspi->Instance->CR1, SPI_CR1_CRCNEXT);
/* Read the latest data */
if(SPI_WaitFlagStateUntilTimeout(hspi, SPI_FLAG_RXNE, SET, Timeout, tickstart) != HAL_OK)
{
/* the latest data has not been received */
errorcode = HAL_TIMEOUT;
goto error;
}
/* Receive last data in 16 Bit mode */
if(hspi->Init.DataSize == SPI_DATASIZE_16BIT)
{
*((uint16_t*)pData) = hspi->Instance->DR;
}
/* Receive last data in 8 Bit mode */
else
{
(*(uint8_t *)pData) = *(__IO uint8_t *)&hspi->Instance->DR;
}
/* Wait the CRC data */
if(SPI_WaitFlagStateUntilTimeout(hspi, SPI_FLAG_RXNE, SET, Timeout, tickstart) != HAL_OK)
{
SET_BIT(hspi->ErrorCode, HAL_SPI_ERROR_CRC);
errorcode = HAL_TIMEOUT;
goto error;
}
/* Read CRC to Flush DR and RXNE flag */
tmpreg = hspi->Instance->DR;
/* To avoid GCC warning */
UNUSED(tmpreg);
}
#endif /* USE_SPI_CRC */
/* Check the end of the transaction */
if((hspi->Init.Mode == SPI_MODE_MASTER)&&((hspi->Init.Direction == SPI_DIRECTION_1LINE)||(hspi->Init.Direction == SPI_DIRECTION_2LINES_RXONLY)))
{
/* Disable SPI peripheral */
__HAL_SPI_DISABLE(hspi);
}
#if (USE_SPI_CRC != 0U)
/* Check if CRC error occurred */
if(__HAL_SPI_GET_FLAG(hspi, SPI_FLAG_CRCERR) != RESET)
{
/* Check if CRC error is valid or not (workaround to be applied or not) */
if (SPI_ISCRCErrorValid(hspi) == SPI_VALID_CRC_ERROR)
{
SET_BIT(hspi->ErrorCode, HAL_SPI_ERROR_CRC);
/* Reset CRC Calculation */
SPI_RESET_CRC(hspi);
}
else
{
__HAL_SPI_CLEAR_CRCERRFLAG(hspi);
}
}
#endif /* USE_SPI_CRC */
if(hspi->ErrorCode != HAL_SPI_ERROR_NONE)
{
errorcode = HAL_ERROR;
}
error :
hspi->State = HAL_SPI_STATE_READY;
__HAL_UNLOCK(hspi);
return errorcode;
}
As a result, the variable result is equal to 0, or showing randomly changing values.
What I'm doing wrong?



