Other Parts Discussed in Thread: SN74LVC3G17
Hello all,
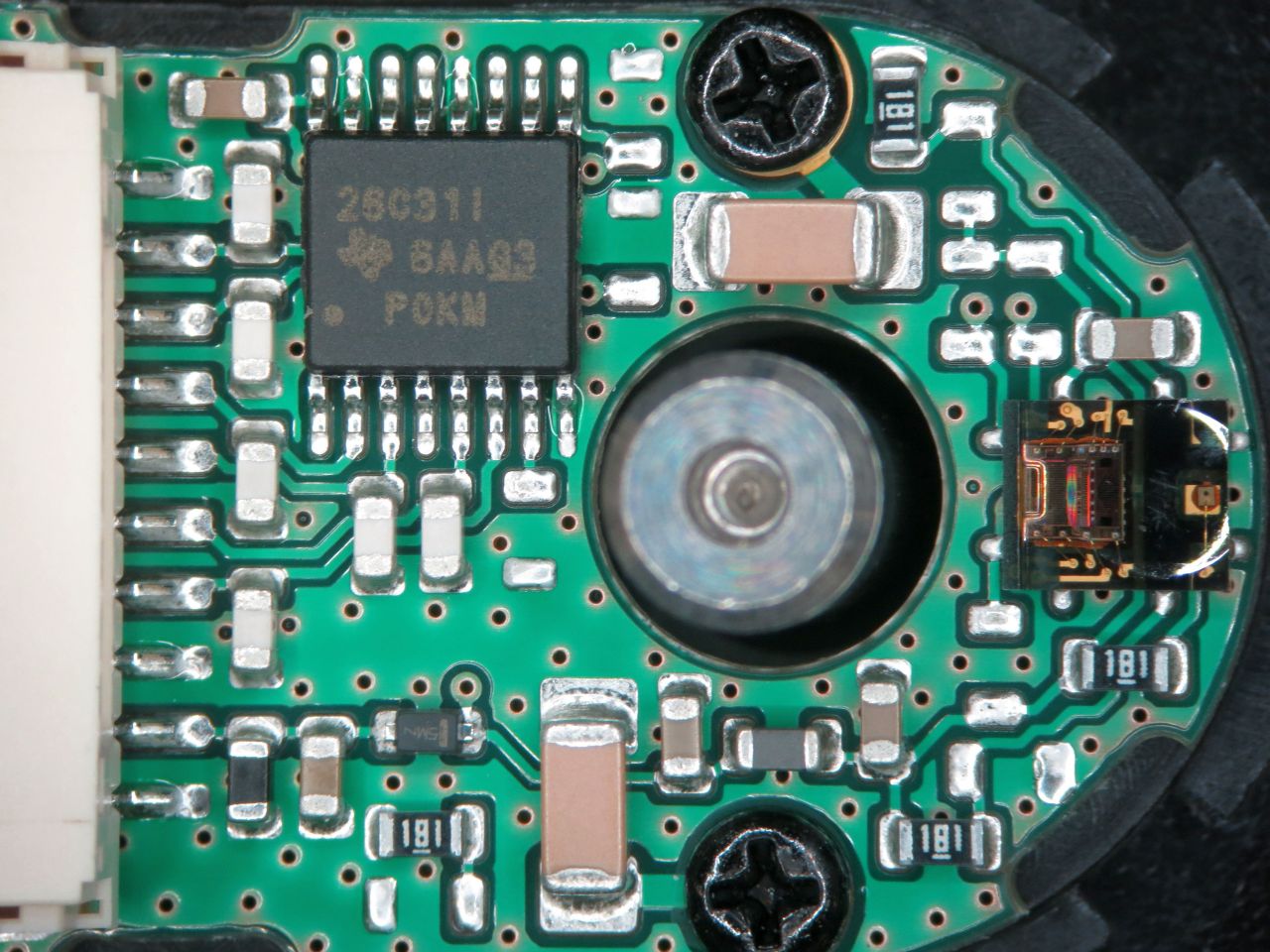
is the usage of the output and inverted output at the AM26C31 mandatory?
In my design I am using only the output to drive the pullup and the low pass on the receiver site and left the inverted output open.
Can this lead to malfunctions on the AM26C31?
Thx for your support.
Regards, Burkhard