

2002年に最初のロボット掃除機が発売されて以来、その性能はめざましく向上し、使用可能な場所や用途などの選択肢は著しく広がっています。主なロボット掃除機の多くは世代交代を重ね、すでに第6世代となっています。ここでは、ロボット掃除機の主な機能と現在のトレンドを紹介するとともに、ロボット掃除機の要件にモータ・ドライバがどのように対応しているかについて解説します。
ロボット掃除機を語る上で欠かせないデバイスがモータ・ドライバです。モータを駆動(ドライブ)して正しく掃除が行われるようにする部品ですが、まさにロボット掃除機の進化を推進(ドライブ)しているデバイスでもあります。他の家庭用ロボットと同様に、モータ・ドライバは性能を向上し続ける一方で、小型化も進んでいます。
ロボット掃除機には、今後、進路に迷うといった不器用さの改善と、高速化が期待されています。デザイン面では、さらに小型化が進んで、キッチン・キャビネットの下やソファーと床との狭い隙間など、窮屈な場所も掃除できるようになると思われます。
ロボット掃除機の設計上の課題
ロボット掃除機には、設計上の最大の課題が2つあります。バッテリ駆動時間と信頼性です。ロボット掃除機は、バッテリで駆動され、充電ドックで充電されるものがほとんどです。図1は、ロボット掃除機の一般的なブロック図です。
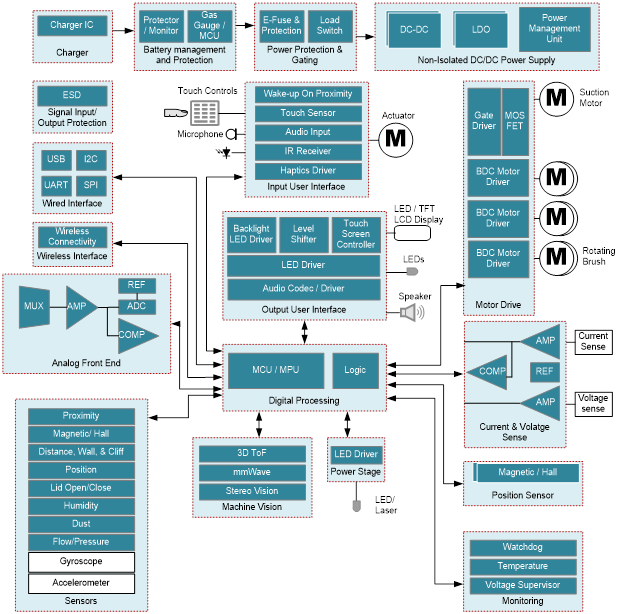
図1:ロボット掃除機のブロック図
モータはロボット掃除機の主要部品です。モータを駆動する方法と使用するモータ・ドライバの種類によって、バッテリの駆動時間と信頼性が決まります。
ここでは、ロボット掃除機の消費電力の大部分を制御している主なシステム・ブロックと、使用されている主なモータ、およびシステム要件を見ていきます。電力消費の制御・節減を行うモータ・ドライバの種類はシステム要件によって決まります。
- ロボット掃除機の重要な機能である吸引は、3~4A(ピーク電流は一般に8A程度)の電流で駆動されるモータによって行われます。高い効率と十分な保護機能が主な要件です。騒音の低減と効率向上のため、一般にブラシレス・モータが使用され、ブラシレス・モータ用ドライバで駆動されます。
- 双方向に回転する2つのホイール(車輪)には、ブラシ付きモータが使用され、ブラシ付きモータ用ドライバで駆動されます。初期のモデルは1方向にしか回転できませんでしたが、双方向回転ホイールは、動けなくなったロボットを後戻りさせたり、移動が困難な場所で方向転換したりできる点できわめて有効です。ホイールには、一般にRMS定格電流が1A未満の低速モータが使用されます。タイルや木のなめらかな床だけではなく、ふかふかしたカーペットの上なども移動しなければならないため、十分なトルクが必要です。もう1つの重要な要件は、出力電流を監視し、高い電流値が長時間継続した場合にマイコンにフィードバック信号を送信することです。これにより、マイコンはロボット掃除機が動けなくなっていることを通知できます。
- メイン・ブラシは、ロボット掃除機の中央にあるブラシ付きモータを使用して、ごみを床からかきとる役割を果たしています。このモータは、高いRMS定格電流(約3A)の中速モータです。
- 種類やメーカーによって異なりますが、ロボット掃除機には1方向回転のサイド・ブラシが1つまたは2つ搭載されており、中速のモータで駆動されています。サイド・ブラシは、ロボットの中央部に向かって回転するため、かき出したごみはメイン・ブラシに引き込まれます。モータのRMS定格電流は1A未満です。
上述のモータの多くは、RMS定格電流が1A~3Aのブラシ付きモータであり、図2に示すように、ブラシ付きモータおよびブラシレス・モータを駆動するTIのモータ・ドライバがいくつか搭載されています。
初期世代のロボット掃除機では、外部のシャント抵抗の両端で電流を検出して出力電流を監視していました。シャント抵抗は、価格が高い上に、サイズが大きく、基板上で大きな面積を占めていました。また、シャント抵抗を使用することで消費電力が増え、バッテリ駆動時間が短くなっていました。
図3上に、初期世代のロボット掃除機のブロック図を示します。『DRV8870』の場合、電流検出用のシャント抵抗とフィードバックをマイコンに送信するための外部アンプが別途必要になります。その結果、基板に余分なスペースが必要になり、コストが増加し、配線が複雑化し、保守負担が増えていました。
図3下は、『DRV8870』を『DRV8874』または『DRV8876』に置き換えた場合のブロッ���図です。電流の検出とフィードバックはモータ・ドライバ内部で行われるため、電流検出用の抵抗とアンプが不要になります。

図3:双方向モータ用ドライバ『DRV8870』を『DRV8874』または『DRV8876』に置き換えた例
図4は、『DRV8870』と『DRV8876』との間でシャント抵抗の分だけ基板面積が小さくなることを示しています。
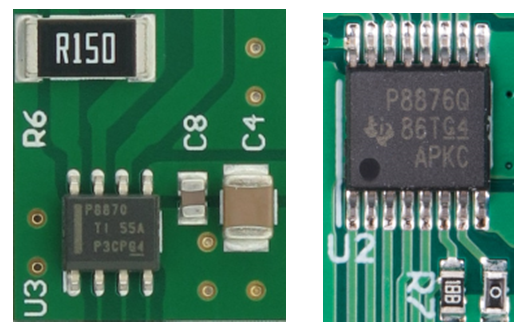
図4:外付けシャント抵抗による『DRV8870』と『DRV8876』の基板サイズの違い
モータを双方向に回転させる必要がある場合(ホイール用、メイン・ブラシ用のモータ)の場合、モータ・ドライバは2つのマイコンピンを使用してモータを駆動するため、2つの入力(N1およびN2)が必要です。
ロボット掃除機には、一方向に回転するサイド・ブラシも搭載されています。一方向回転モータを使用する場合、『DRV8874』または『DRV8876』では、入力ピンは1つ(ENピン)しか必要ないため、図5のように、マイコンピンが少なくなっています。

図5:『DRV8874』または『DRV8876』による一方向回転モータの駆動
『DRV8874』と『DRV8876』には、バッテリ駆動時間と信頼性に寄与する多数の長所があります。電流検出機能が内蔵されているため、外部のシャント抵抗は不要で、部品コストと占有スペースを削減できるだけでなく、設計上の労力を大きく軽減できます。
また、電流検出機能が追加されたことによって、外部のフィードバック用ゲイン・アンプが不要になります。これらのデバイスは、スリープ時電流が小さく、サイズの大きいシャント抵抗がないため、ロボット掃除機の消費電力の節減、バッテリ駆動時間の延長に貢献します。また、内蔵されている電流検出機能によって動的なストール監視が可能になり、モータが動かなくなった場合や、ホイールに経年劣化や摩損があったか否かの判断を行うことができます。内蔵の電流検知機能およびIPROPIの詳細については、技術資料[1]を参照してください。
ブラシ・モータ用『DRV887x』ファミリは、ピン互換、RDS(on)スケーラブルで、ピーク電流10Aまでの幅広い用途に対応します。『DRV8876』は、3mm×3mmのQFNパッケージで供給されます。
ロボット掃除機の機能が向上し用途が広がるのにつれて、消費電力が増えるとともに充電に必要な時間も長くなっています。さまざまな機能が統合された『DRV8876』および『DRV8874』は、占有スペースの低減、コストの削減、総消費電力の節減によって、用途拡大に伴うさまざまな課題の解決に貢献しています。
参考資料
+ 技術資料(英語) "Advantages of integrated current sensing"
+"Calculating Motor Driver Power Dissipation"
+"PowerPADTM Thermally Enhanced Package"
+『DRV8876』のデータシートはこちら
※上記の記事はこちらの技術記事(2019年7月17日)より翻訳転載されました。
※すべての登録商標および商標はそれぞれの所有者に帰属します。
※ご質問はE2E Support Forumにお願い致します。
