

このリアルタイム制御シリーズの前回の記事では、処理機能ブロックに注目しました。今回は、リアルタイム制御の (システムを更新する) アクチュエータ駆動段について説明します。また、信頼性の高いシステム出力動作を実現するうえで、この段が重要な理由も解説します。
たとえば、モーター・ドライブ・アプリケーションで、モーターの始動、加速、ダイナミックな速度の調整、またはモーター・システムの減速を実現するために、モーターの速度、位置、トルク、の正常性をリアルタイムで監視および測定しようとすることがあります。同様に、半導体やバッテリの試験装置の場合、D/A コンバータを使用して高速制御ループの経路内で高精度アナログ信号を送信し、GaN (窒化ガリウム) ベースのサーバー電源 (PSU) の出力電力をさまざまな負荷条件に合わせて調整したり、停電発生時に無停電電源 (UPS) 内の MOSFET (金属 - 酸化膜 - 半導体の電界効果トランジスタ) を駆動するゲート・ドライバを調整したりできます。これらすべての例で、リアルタイム制御システムにとって非常に重要なのは、(モーター・ドライブ、バッテリ試験装置、電源装置などのアプリケーションで) アクチュエータ駆動の変調と調整を行うことです。
モーターの動作中には、信頼性の高いモーターのアクチュエータ駆動を支援するために、さまざまな段階が発生します。モーターに関連するさまざまな段階としては、始動前、モーターの始動、開ループ、閉ループ、モーターの停止などがあります。閉ループ段階では、高精度のリアルタイム・フィードバックをシステムに渡します。それによって、さまざまな変数を定期的に監視し、閉ループ応答の手法に従ってアクチュエータ駆動を行います。これを図1に示します。
 図 1:モーター動作の複数の段階
図 1:モーター動作の複数の段階
高効率
各種機器の電化が進む中で、さまざまな家電製品やアプリケーション (用途) にわたって、エネルギー効率のいっそうの向上を求める多様な規格が登場しています。Energy Star、80 Plus、ErP Lot 9 などです。そのため、短時間で変化が生じる間にも消費電力とシステム負荷を低減できるように、リアルタイム制御システムで最大限の効率を維持することが重要です。非常に効率的なシステムを実現できれば、応答の迅速化、総所有コストの低減、寿命の延長につながります。
たとえば、ロボット型掃除機は、バッテリの充電量に基づき、起動するたびに床清掃面積を最大限確保する必要があります。その目標を達成するために、床の材質やごみの量の変化を検出したとき、あるいは何か物体が掃除機の中で詰まったときに、吸引力をリアルタイムで調整することができます。掃除機の吸引モーターを駆動しているのはブラシレス DC (BLDC) モーター・ドライバですが、この吸引モーターはできるだけ効率を高める必要があります。消費電力の要因として、スイッチング損失、ドレイン - ソース間オン抵抗 RDS(on)、MOSFET のスルーレートなどが存在するからです。これらの要因を低減するために、スルーレートの引き上げ、PWM (パルス幅変調) 出力周波数の引き下げ、RDS(on)の小さい MOSFET によるモーター駆動、シングルエンドなど別の PWM 変調モードの使用といった、いくつかの手法が採用可能です。
白物家電を購入する消費者は、より騒音の小さいシステムを希望します。BLDC モーター・ドライバは、正弦波駆動や、最新の FOC (フィールド・オリエンテッド・コントロール:磁界方向制御) のような制御手法を採用し、より良好な音響特性を実現しています。設計者はこれらを活用し、90 度の磁束を維持することで、最高のモーター効率を達成できます。TI のプログラミング不要なシングルチップ・センサレス『MCF8316A』BLDC モーター・ドライバを採用すると、システム設計者は連続 PWM 変調、デッドタイム補正、可変整流モードなどの各種制御方式を使用して、可聴ノイズを最小化することができます。
図 2 は、音響特性を最適化する前と最適化した後で、『MCF8316A』の可聴ノイズを比較しています。
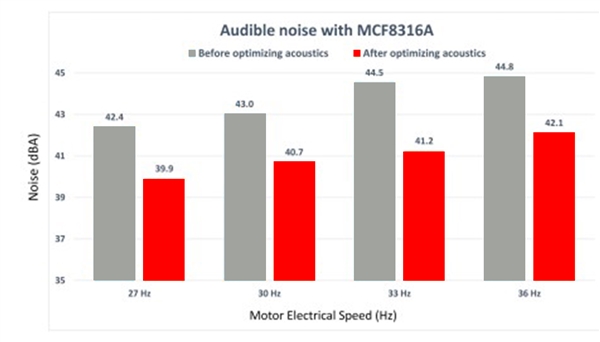 図 2:『MCF8316A』使用時の可聴ノイズの比較
図 2:『MCF8316A』使用時の可聴ノイズの比較
信頼性
リアルタイム制御システムの保護メカニズムは、高温や低温のような過酷かつ予測できない環境や、外部要因が電気的、ときには物理的な影響をシステムに及ぼす環境であっても、信頼性の高い動作を実現するのに役立ちます。1 つの例として、システムがモーター・ドライブのような可動部品を搭載している状況を考えましょう。モーターのロック (固着) を検出または予測する能力があると、電力損失と、デバイスの故障や破損を最小限に抑えるのに役立ちます。TI の『MCF8316A』はモーターの動作中、モーターのさまざまなロック条件を継続的に監視し、ロック事象を検出したときは直ちに対策を実施します。アクチュエータ駆動の実際的な 1 つの例は、ロボット型掃除機が自らの経路上にタオルや手ぬぐいのような物体を検出したときです。システム負荷は急上昇します。その結果、システムはモーター・ロックの条件が発生したと判定し、モーターを反対方向に回転させることで、物体を放して通常動作を継続することが可能です。
また、『MCF8316』のようなプログラミング不要のモーター・ドライバは、モーター故障検出など複数の重要な機能も管理し、システム全体の信頼性をさらに向上させる複数の保護メカニズムを実装しています。
図 3 は、BLDC を使用する標準的なリアルタイム制御モーター・システムのブロック図であり、ここでは電圧と電流の各センス抵抗が (保護メカニズムを土台として) モーターからのフィードバックをコントローラに定期的に供給します。コントローラはそれに応じてアクチュエータ制御を適切に実行するために、さまざまな PWM 信号をモーター・ドライバに送信します。
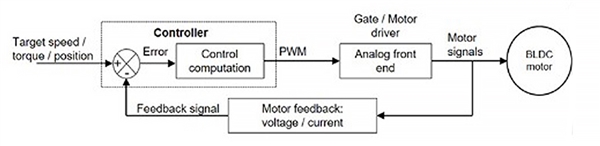 図 3:センサレス BLDC を使用するリアルタイム制御モーター・システム
図 3:センサレス BLDC を使用するリアルタイム制御モーター・システム
精度
信頼性の高い動作にとって、リアルタイム制御システムの精度は非常に重要です。モーター向けの標準的な閉ループ・システムは、最高の速度精度と最短のレイテンシを実現するうえで、ドライバの処理速度に依存しています。また、閉ループ・フィードバックを供給する必要のあるリアルタイム制御システム内で、電流センス・アンプは幅広い同相電圧範囲と温度範囲にわたって、最高レベルの電流センス精度を達成します。
睡眠時無呼吸が発生する患者向けの持続的気道陽圧 (CPAP) 機器のようなアプリケーションでは、高性能のリアルタイム制御システムによって空気の流れの阻害を継続的に監視し、患者の気道を開くために必要な空気を供給します。別の例として、図4に示すような DLP® プロジェクタ・アプリケーションでは、ホーム・シアター・プロジェクタなどの最終製品で高品質のカラー画像を投影するために、カラー・ホイール・モーター・システムで高い速度精度 (1%) が必要とされます。
 図 4:DLP ホーム・シアター・プロジェクタ
図 4:DLP ホーム・シアター・プロジェクタ
まとめ
リアルタイム制御システムのアクチュエータ駆動段は、システム条件の多様な変化を継続的に監視するセンシング段からのさまざまな種類のフィードバックに依存しています。これらの変化は制御段に渡され、制御段はデータを解釈して、次のアクチュエータ駆動コマンドを送信します。デッドタイム補正を通じた可聴ノイズの最小化、モーター・ロック検出機能の実現、高精度の速度の実現など、どのような価値提案を重視する場合でも、産業用や車載の多くのアプリケーションで、BLDC モーター・ドライバはアクチュエータ駆動における重要な役割を果たしています。
参考情報:
+TI の電流センス・アンプ製品のラインアップ
+TI の GaN (窒化ガリウム) IC 製品のラインアップ
+TI のブラシレス DC (BLDC) モーター・ドライバ製品のラインアップ
※すべての登録商標および商標はそれぞれの所有者に帰属します。
※上記の記事はこちらの技術記事(2022年10月25日)より翻訳転載されました。
※ご質問はE2E Support Forumにお願い致します。