

ミリ波 (mmWave) レーダーは車載と産業用の各アプリケーションに適した高精度センシングの1 つの形態であり、距離、角度、速度など物体に関する価値のある情報を提供することで、数 cm から数百 m 先にある各種物体を検出できるスマート・センシング・ソリューションの実現を可能にします。
通常、レーダー・センサはプリント基板 (PCB) 上で組み立てられ、レーダー・トランシーバ、アンテナ、パワー・マネージメント回路、メモリ、インターフェイス・ペリフェラルなどの部品を使用します。PCB 上に配置するアンテナは、Rogers R03003 のような高周波対応の基材を必要とします。図 1 では、銀色の配線がこれに相当します。
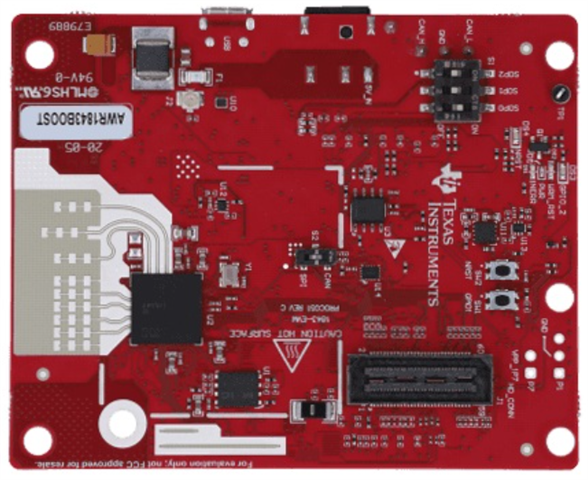 図1:PCB 上で 1 つのアンテナを使用するレーダー・センサ
図1:PCB 上で 1 つのアンテナを使用するレーダー・センサ
一方、基板ではなくパッケージにアンテナを取り付ける AoP (アンテナ・オン・パッケージ) 配置を採用すると、高周波対応の基材が不要になり、コストの削減、製造の複雑さの軽減、約 30% のボード面積節減につながります。TI の AoP 技術はフリップ・チップ・パッケージ技術を採用し、モールドレス基材の直上にアンテナを配置します。損失の大きいモールド基材の上にアンテナを張り巡らす場合、効率が低下し、不要輻射 (スプリアス電磁波) が発生する可能性がありますが、AoP はこれら欠点の解消が可能です。多層基材を使用すると、ボード・サイズをいっそう小型化し、アンテナとシリコン・ダイをより簡単に重ね合わせることができます。
図 2 に示すように、『AWR1843AOP』 デバイスはパッケージ基材の直上にアンテナを搭載しています。
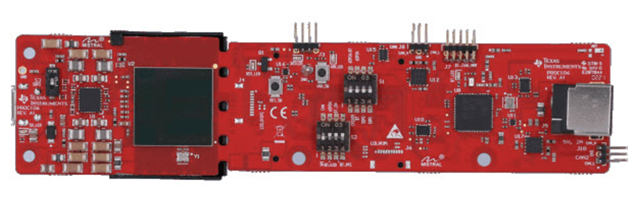 図2:AoP 技術を使用した TI のレーダー・センサ
図2:AoP 技術を使用した TI のレーダー・センサ
AoP を採用する場合の利点は、以下のとおりです。
- 超小型のフォーム・ファクタ
- 部品表 (BOM) コストの削減
- アンテナの設計、シミュレーション、性能の特性評価がいずれも不要なので、エンジニアリング (設計と製造) コストの削減と開発期間の短縮が可能
- シリコン・ダイからアンテナへの配線を短縮できるので、電力損失が低下
AoP が車外の近距離センシング・アプリケーションに役立つ理由
自動車メーカーは、ADAS に該当しない、自動車のドアやトランクの自動開扉など、いくつかの機能を自律型動作に切り替える方向で動いています。このような機能を実現するには、ドアやトランクを開くときに衝突を防止するために、さまざまな種類の物体を検出できる高分解能センサが必要です。
TI の 『AWR1843AOP』 ミリ波レーダー・センサは、近距離センシング・アプリケーションに適しており、AoP を統合した低消費電力のシングルチップ・ソリューションを使用して 3 次元方向の検出を行います。この高集積センサは十分小型なので、ドア・ハンドル、ロッカー・パネル (サイドシル、ドア下部の細長い保護部品)、B ピラー (前部座席の窓と後部座席の窓の間にある柱) などの小さな空間に収容できます。さらに、『AWR1843AOP』 は距離分解能が高いので、物体のサイズ、形状、構造にかかわりなく、他の物体を検出できます。
複数の静止物体の検出
『AWR1843AOP』 は 76 ~ 81GHz の周波数帯で動作し、4cm 未満という微細な分解能を実現しています。広い視野角と高い距離分解能の組み合わせにより、複数の静止物体が存在している状況でも、それらを同時に検出し、区別することができます。たとえば、図 3 では、『AWR1843AOP』 評価キットを自動車のドア上の地表 43cm の高さに取り付けています。図では、このままドアを開くと衝突してしまう位置に、工事などに使用する三角コーンが置かれています。このコーンは、グラフィカル・ユーザー・インターフェイス (GUI) の中で赤い曲線として示されています。また、センサから見て遠く離れた位置に、金属製ポールがあります。このポールは、このままドアを開いても衝突しない範囲内にあるので、安全を意味する緑色で示されています。
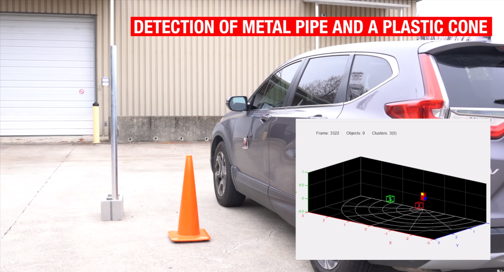 図3:プラスチック製三角コーン(衝突範囲内に配置)と金属製ポール(衝突範囲外に配置)の検出
図3:プラスチック製三角コーン(衝突範囲内に配置)と金属製ポール(衝突範囲外に配置)の検出
低い位置にある物体の検出
自動車のドアの障害物検出センサは、センサの高さより低い位置にある物体との衝突を防止するために、周囲を 3 次元認識できるソリューションを必要とします。ToF (タイム・オブ・フライト) や超音波のような他のセンシング技術は、センサの高さに比べて上または下方向に大きく離れた位置にある物体を検出できない可能性があります。小型の車止めや縁石など、低い位置にある物体を検出しようとする場合、これらのソリューションは十分な信頼性を確保できないことがあります。カメラ・ベースのソリューションは低い位置にある物体を検出できますが、雨や雪など天候条件が悪いときには十分な信頼性を確保できません。『AWR1843AOP』 デバイスは水平方向と上下方向の両方を検出できるので、低い位置にある物体の検出にも対応できます。また、ミリ波レーダー・センサは悪天候条件への対応能力もあります。図 4 に、『AWR1843AOP』 評価基板 (EVM)を使用して、低い位置にある縁石に見立てたコンクリート・ブロックを検出する例を示します。
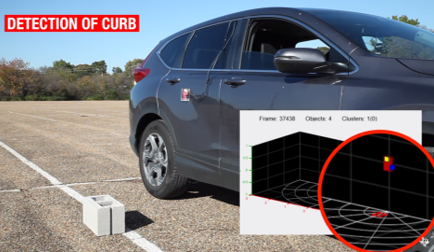 図4:TI の 『AWR1843AOP』 EVM を使用して低い位置にある縁石を検出
図4:TI の 『AWR1843AOP』 EVM を使用して低い位置にある縁石を検出
表面積が小さい物体の検出
自転車やショッピング・カートのような物体は、特に正面から見ると投影面積が小さくその形状や構造が原因で、相対的な方向によっては検出が困難です。『AWR1843AOP』 は距離分解能が高く、視野角も広いので、図 5 に示すように表面積が小さい物体も検出できます。

 図5:『AWR1843AOP』 EVM を使用して表面積が小さい物体を検出
図5:『AWR1843AOP』 EVM を使用して表面積が小さい物体を検出
マルチモード対応機能
『AWR1843AOP』 はマルチモード対応のプログラマブルなデジタル信号プロセッサなので、同じセンサを再構成して複数のアプリケーションに対応できます。たとえば、『AWR1843AOP』 デバイスを (車のドアを自動で開くための) 障害物検出センサとして使用することや、(車の走行中に死角に入っている物体を検出する) 側面レーダー・センサとして使用することができます。このマルチモード対応機能を活用すると、複数のセンシング・アプリケーションを実装する場合であっても、特性評価や製品習熟の労力が減り、全体的なシステム・コストを削減できます。図 6 に、ドアの障害物検出センサを使用して、5m 離れた場所にいる自転車に乗った人を検出する例を示します。
 図6:ドアの障害物検出センサを使用して、5m 離れた場所にいる自転車に乗った人を検出
図6:ドアの障害物検出センサを使用して、5m 離れた場所にいる自転車に乗った人を検出
TI の AoP 技術を使用すると、ドア・ハンドルのような新しい場所にセンサを配置するフレキシビリティが得られます。77GHz の 『AWR1843AOP』 センサは、ドアの障害物検出、トランクの障害物検出、基本的な死角検出、パーキング・アシストのような各種アプリケーションで開発期間の短縮とシステム・レベルのコスト削減を可能にします。
参考情報:
+リファレンス・デザイン
+『AWR1843AOP』評価基盤
+リファレンス・ソフトウェア(英語)
+物体検出
+トレーニング・ビデオ(英語)
+超短距離レーダー
+『XA1843ARBGALP』
+『AWR1843AOP』データ・シート
+『AWR1843AOP』技術情報
+ミリ波レーダー・トレーニングシリーズ(英語)
※すべての登録商標および商標はそれぞれの所有者に帰属します。
※上記の記事はこちらの技術記事(2021年5月27日)より翻訳転載されました。
※ご質問はE2E Support Forumにお願い致します。