

オープン・コンセプトのフロア・プラン、つまり壁や扉による明確な仕切りを設けない間取りが家庭やオフィスで新しく登場し、またハイブリッド車や電気自動車への移行も進む中で、より静音かつより効率的なモーター制御への需要が大きく高まっています。音響学の観点では非常に小さな違いであっても、可聴ノイズには大きな違いが生じる場合もあります。
図 1 に、居室内のさまざまな家電製品が全体の騒音レベルにどれほど寄与しているかを示します。モーター制御回路の電力密度の向上、統合の強化、システム効率の向上とともに、高度なリアルタイム制御方式を採用すれば、システムの音響性能の改善につながります。いくつかの付加的な手法として、連続パルス幅変調 (PWM) を使用するベクトル磁界方向制御 (FOC) アルゴリズム、振動を低減するための特定の制御アルゴリズム、デッドタイム補償と PWM 生成機能を適用して可聴ノイズを低減する統合型制御を挙げることができます。

図 1:オープン・コンセプトの台所とリビングルームで発生する可聴ノイズ
モーション・コントロール・アプリケーションで可聴ノイズを低減するための製品や手法にはこのようにさまざまなものがあり、開発中のアプリケーションにとってどの手法が最適なのか、簡単には決定できない可能性があります。この記事では、制御ゲート・ドライバを内蔵したブラシレス DC (BLDC) モーター・ドライバを例として使用し、モーション・コントロール・アプリケーションで可聴ノイズを低減する主な 3 つの方法を紹介します。
モーション・コントロールに関連する技術記事シリーズ
|
モーション・コントロールに関連する TI の技術記事シリーズの第 1 部『産業用ドライブ内で高精度のモーション・コントロールを実現する方法』をお読みください。 |
PWM
モーション・コントロール・アプリケーションで可聴ノイズを低減する最初の手法は、連続 PWM です。PWM は、トランジスタのオンとオフを切り替えることで出力波形を生成する技法です。その結果、ある特定の時点でモーターの電圧はハイとローのどちらかになります。モーター内のインダクタンスがこれらの波形をフィルタリングする役割を果たし、実質的に出力波形の平均値がモーターに供給されます。デューティ・サイクル (波形のオン時間とオフ時間の比率) を調整すると、平均電圧が変化します。図 2 に、PWM を使用して生成した正弦波の例を示します。

図 2:PWM を使用した正弦波生成の例
たとえば、制御ゲート・ドライバを内蔵したセンサレス FOC BLDC モーター・ドライバである TI の MCF8315A は、連続と不連続両方の空間ベクトル PWM 方式を実装しています。連続変調は、インダクタンスの小さいモーターで電流リップルの低減に役立ちます。ただし、3 相すべてがスイッチングするので、スイッチング損失が大きくなります。不連続変調は、一度にスイッチングするのが 2 つの相のみであり、スイッチング損失は小さくなりますが、電流リップルは大きくなります。図 3 と図 4 に、連続 PWM と不連続 PWM の違いを示します。
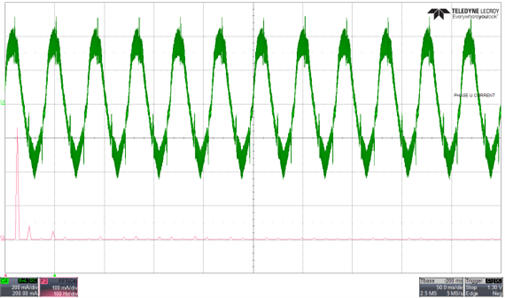
図 3:不連続 PWM に対応する相電流の波形と FFT (高速フーリエ変換)
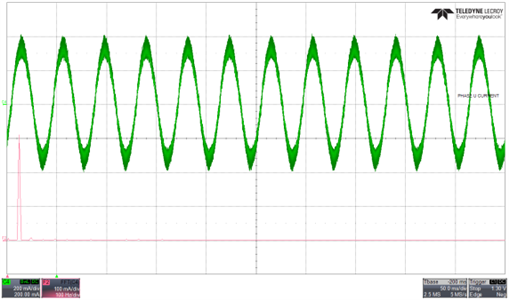
図 4:連続 PWM に対応する相電流の波形と FFT
デッドタイム補償
モーション・コントロール・アプリケーションで可聴ノイズを低減する 2 番目の手法は、デッドタイム補償です。モーター制御アプリケーションで、ハーフブリッジを構成しているハイサイド金属酸化膜半導体電界効果トランジスタ (MOSFET) とローサイド MOSFET のスイッチングの間にデッドタイムを挿入すると、(両方の MOSFET が同時にオンになる) 貫通電流の状態を回避できます。デッドタイムを挿入した後には、相ノードの想定電圧と実際の印加電圧が異なり、相ノードの電圧によって相電流に望ましくない歪みが生じ、可聴ノイズの原因となります。
この追加ノイズを管理するために、共振コントローラを使用して相電流の高調波成分を制御するデッドタイム補償機能を統合できます。その結果、図 5 に示すように、デッドタイムに起因する電流の歪みが低減されます。
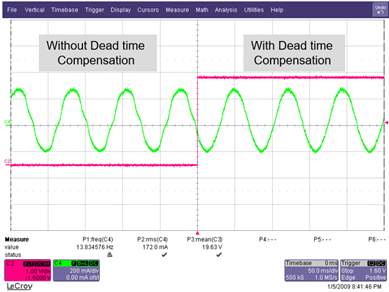
図 5:センサレス FOC のデッドタイム補償に関する分析結果
たとえば、制御ゲート・ドライバを内蔵したセンサレス FOC BLDC モーター・ドライバである TI の MCF8316A は、この内蔵機能を使用し、図 6 に示すように、複数の電気的速度にわたって音響特性を最適化することができます。
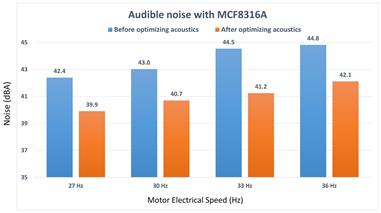
図 6:PWM 変調とデッドタイム補償の実装による MCF8316A の音響特性の最適化
可変整流モード
モーション・コントロール・アプリケーションで可聴ノイズを低減する最後の手法は、可変整流モードです。台形波整流を行う場合、主に 120 度と 150 度という 2 つの構成があります。台形波の 120 度構成は、音響ノイズの増大につながる可能性があります。ハイ・インピーダンス期間が長いため、トルクのリップルが増加するからです。図 7 と図 8 をご覧ください。台形波の 150 度構成は、ゼロ交差を検出するためのウィンドウ (期間) が短いため、低速でのみ動作できます。
これらの課題を克服し、音響性能を改善する目的で、台形波の 120 度構成と 150 度構成の間で動的な切り替えが可能なモーター・ドライブ・システムを製作できます。この動的変調を採用すると、BLDC モーター制御中の全体的な音響性能を改善できます。
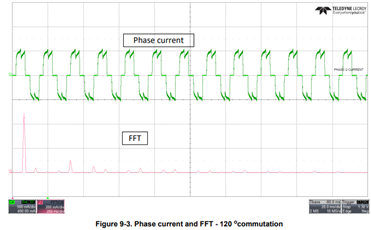
図 7:相電流と FFT:120 度整流
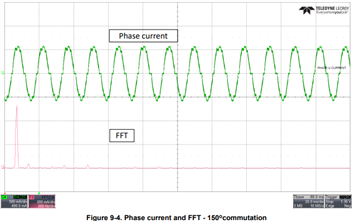
図 8:相電流と FFT:150 度整流
たとえば、TI の MCT8329 と MCT8316 など、台形波制御ゲート・ドライバを内蔵したセンサレス BLDC ドライバは、この内蔵機能を使用し、図 9 に示すように、複数の電気的速度にわたって音響特性を最適化できます。
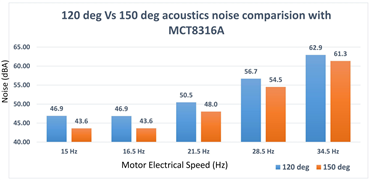
図 9:動的変調を使用した可変整流モードの実装による MCF8316A の音響特性の最適化
まとめ
より効率的かつ音響特性を重視したシステムの製作を支援できるように、TI はモーション・コントロール技術への投資を続け、音響要件に対応できる設計を採用した各種構成要素を供給しています。システムを設計する際は、モーション・コントロール・アプリケーションで可聴ノイズを低減するこれら 3 つの方法についてご検討ください。
参考情報
- TI のアプリケーション・レポート『コーディング不要のセンサレス BLDC モーター・ドライブを使用してモーターのノイズを低減する方法』、またはビデオ『BLDC モーター・ドライバを使用してモーターの可聴ノイズを低減』をご覧ください。
- TI の制御機能を統合した BLDC ドライバ、ブラシレス DC (BLDC) モーター・ドライバ、Arm® ベースのプロセッサ、C2000 リアルタイム・マイコン、MSP430 マイコンの詳細をご覧ください。