

インダストリ 4.0 のオートメーションを目指す流れに伴い、産業用ロボット、協力ロボット (コボット)、また AGV (automated guided vehicle:無人搬送車) や AMR (autonomous mobile robot:自律型移動ロボット) のようなサービス・ロボットを含め、工場へのロボットの導入増加は勢いを増しています。多くの場合、これらのロボットは人間の近くで動作するので、衝突の可能性を認識するための高度なセンシング能力と機能安全対応能力を搭載し、身体的負傷や資産への損害のリスクを最小化する必要があります。
産業用ロボットは、組み立てや溶接のような反復作業を実行するために、製造業で幅広く採用されています。この種のロボットは最大 1,000kg 前後の荷重を最大 10m/s の速度で容易に取り扱うことができるので、人間が同じ作業を実行する場合に比べて、効率と製造生産性の水準を引き上げることができます。産業用ロボットは通常、人間を保護するためにケージやフェンスの内側で動作し、人間がその中に立ち入った場合にロボットを安全に停止させるための各種センサを搭載しています。
安全ケージは人間を産業用ロボットから保護するための従来型アプローチとして採用されてきましたが、この慣行には固有の短所もあります。第 1 に、ケージはかなりのスペースを占有し、より多くのロボットを工場の現場に追加しようとするメーカーに制限を加えることになります。第 2 に、人間が安全ケージの中に立ち入るたびにロボットを停止させると、サイクル時間が長くなります。産業用ロボットの使用状況という観点では、サイクル時間はロボットが一連の動作を完了させるのに要する時間です。また、サイクル時間は、ロボットのエンド・エフェクタの最高速度にも依存します。サイクル時間を最適化すると、生産性の向上につながります。
適切なセンサ・ソリューションの特定
ある製造会社は最近、自社工場のアップグレードの一環として、仮想的な安全保護ソリューションを視野に入れ、TI に連絡を取りました。人間の安全性を低下させずに自社の産業用ロボットのサイクル時間をできるだけ短く抑えるために、人間が存在している状況で自社ロボットを完全に停止させる代わりに、速度を緩やかにして動作させることを同社は希望しています。
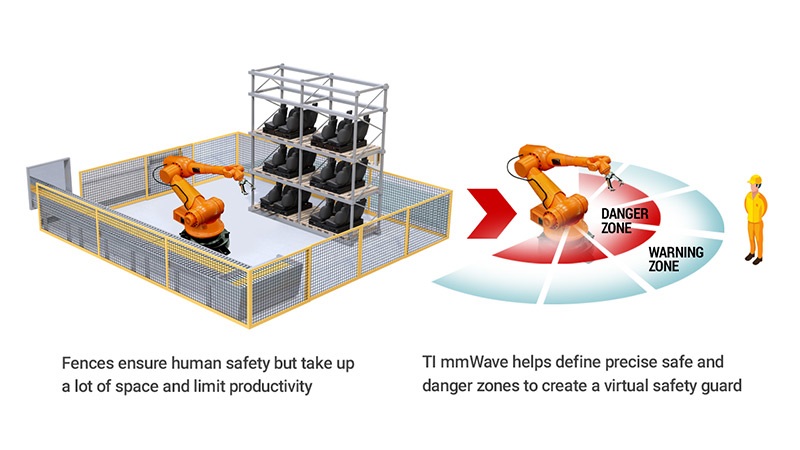
より多くの産業用ロボットを同じ領域に配置し、製造生産性向上のためにサイクル時間を最適化するという全体的な目標を達成できるように、同社は従来の安全ケージを廃止し、仮想的な安全保護機能で置き換えることを求めています。これは非接触型センサ・ソリューションであり、各ロボット・アームの周囲に警告ゾーンと危険ゾーンを規定し、人間が存在する場合にそのことを検出して労働者の安全を確保します。図 1 に、現状および望ましいレイアウトを示します。
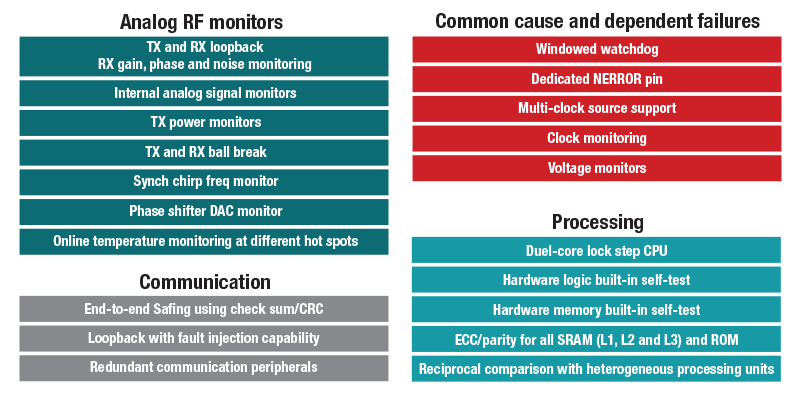
この非接触型センサ・ソリューションは、危険な事態を引き起こす可能性のある障害に関連するリスクを最小化できるように、機能安全であることが必須です。仮にそのような障害が発生した場合、人間の負傷や環境または資産の損害につながるおそれがあります。TI は、このような課題を解決できるように各種ミリ波 (mmWave) レーダー・センサを設計してきました。機能安全の観点から、TI は『IWR6843』のようなミリ波デバイスを開発する際に、ハードウェアとソフトウェアの包括的な開発プロセスに付き従い、TÜV (Technischer Überwachungsverein) SÜD によるデバイス認証を取得してきました。また、『IWR6843』センサは図 2 に示すようないくつかの機能安全メカニズムも組み込んでいます。これらは、偶発的ハードウェア障害への対処能力に関して最大で SIL (セーフティ・インテグリティ・レベル) 2 の水準をコンポーネント・レベルで満たせるようになっており、IEC (国際電気標準会議) 61508 が課している必須の診断カバレッジ (範囲) を実現しています。
TI のミリ波をベースとする安全保護機能には、工場の現場で発生するごみ、煙、照明条件のような環境要因への耐性もあります。機能安全に対応する LiDAR ベースの競合製品と比較すると、ミリ波ベースの製品はコストがより低く、フォーム・ファクタがより小さいという特長があります。これらの理由で、この会社は自社の設計に関する課題を解決するために、『IWR6843』センサの採用を希望しました。あいにく、同社はレーダーや安全性のエキスパートではないので、レーダー・ベースの開発や、自社の最終製品の機能安全認証プロセスに関する追加のガイダンスと必要としていました。レーダーや機能安全に関する専門知識がなく、しかも時間的条件が厳しかったため、同社は機能安全準拠センサをベースとするサード・パーティーの (すぐに使用できる) ターンキー・ソリューションを検討しました。
適切なターンキー・レーダー・センシング・ソリューションの特定
このプロジェクトのリード・エンジニアは、産業用ミリ波レーダー・センサ関連のサード・パーティー検索ツールをダウンロードした後、ターンキー・カテゴリの中で Inxpect社の『IWR6843』ベースの『SBV-01』安全レーダー・センサを見つけました。『SBV-01』は、アクセス検出機能、再起動防止機能、動的 3D カバレッジ領域をサポートしているので、同社の用途との適合度が高いものでした。Inxpect は SBV-01 モジュールの SIL 2 認証プロセスをすでに完了していたので、同社のような最終顧客はこのモジュールをすぐに統合し、SIL 認証済みシステムをより迅速に実現することが可能でした。安全認証は多くの場合、長い期間を必要とすることがあります。多くの状況では、1 年またはさらに長い期間に達します。Inxpect は技術要件と SIL 2 認証の両方に適合するターンキー・ソリューションを提供することで、開発労力の低減、長期にわたる認証プロセスの回避、厳しいスケジュールへの対応を実現できました。
TI のミリ波センサを活用して産業用オートメーション分野のアプリケーション開発を加速する方法については、産業用ミリ波レーダー・センサ関連のサード・パーティー検索ツール(英語) をご覧ください。このツールを使用すると、さまざまな製品カテゴリを参照し、各種パラメータに基づいて並べ替えながら、サード・パーティーに直接連絡を取って支援を求めることができます。
参考情報(英語):
+TI mmWave Area Scanner Demo Video
+Virtual safety guard demo for industrial robots using TI mmWave
+リソース・エクスプローラ
※すべての登録商標および商標はそれぞれの所有者に帰属します。
※上記の記事はこちらの技術記事(2021年8月31日)より翻訳転載されました。
※ご質問はE2E Support Forumにお願い致します。