

「ローカル・ネットワーク」という言葉を聞いた時、インターネット、LAN(ローカル・エリア・ネットワーク)やWi-Fi®またはEthernetを思い浮かべる方が多いことでしょう。これらのテクノロジは堅牢で、広範囲にわたって使われていますが、Wi-Fi向けのワイヤレス・トランシーバであれ、インターネット上で各種のアプリケーションを可能にするプロトコルのサポートであれ、無視できないオーバーヘッド(間接的な設備、経費や処理など)が必要になります。
クルマのような、高度に統合化されたシステムでは、車内の限られた空間内で簡単に配線できるように、低いオーバーヘッドのネットワークのサポートが必要です。膨大な数の電子ノードを、あらゆる場所に展開しようとするなら、ノード単価の削減も重要です。
これらの点から考えると、車内のすべての制御ユニットを1つのWi-Fiネットワークで接続するためには、全ノードに無線のトランスミッタとレシーバを設置しなければならず、高価であるだけでなく、アンテナの物理的な大きさも基板実装上の問題になります。Ethernetを使えば、ノードごとの無線トランシーバが不要になりますが、物理層の実装には、少なくとも4本の信号線が必要になります。この4本の信号線で、低速のエンジン制御ユニット(ECU)へのデータと、高速のビデオ・データの両方を伝送することになります。この速度とオーバーヘッドのトレードオフから、2本の信号線によるコントローラ・エリア・ネットワーク(CAN)と1本の信号線によるローカル・インターコネクト・ネットワーク(LIN)が開発されました。
CANは5Mbps以上の高速伝送と、伝送エラーに対する高い堅牢性を提供することから、多くの設計者に好まれています。LINは、僻地のコミュニティにインターネット・サービスを敷設するために使われる、単信号線大地リターン(SWER)伝送ラインに似ています。地域の各家庭がオンライン接続するためには、メイン・ネットワークに接続する必要がありますが、通常の通信ケーブルでサポートしようとしても、その過大な長さと敷設費用のため実現できません。図1に、インターネットを距離的に離れた家庭に1本の信号線で接続する、SWER伝送ライン(電力線通信)の様子を示します。SWER伝送ラインは、遠すぎて通常の通信ケーブルを敷設できない、「ラストワンマイル」の地域へのサービスを実現するために構築されました。これが、LINが「ラストワンマイル」を接続するネットワークとして知られるようになった由来であり、クルマの中のLINは、お互いに離れて配置された複数のノードを、低価格、低速度の1本の信号線でメイン・ネットワークに接続するために採用されています。

図1:離れた地域のコミュニティを1本の信号線でネットワークに接続するSWER 伝送ライン
クルマの代表的な内部構成には、CAN/LINゲートウェイを持つマイコンが含まれます。CAN はマイコンへのメッセージを作成し、そのメッセージをLINバス経由でリモート・ノードへ伝送します。図2に、LIN経由でレーダー・システムがシート・モータと通信する過程を示します。車内に設置された多くのモジュールにとって、LINはネットワークに接続するための唯一の手段です。表1に、CANとLINの実装の違いの一覧を示します。
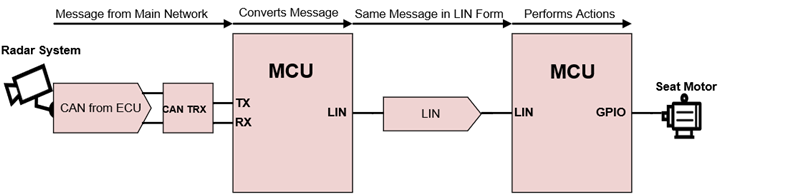
��2:車載レーダー用ネットワークからのメッセージがLIN経由でリモート・シート・モータに届く様子
| CAN | LIN |
| 電源電圧の安定性が必要 | システム電源とは独立して動作可能 |
| タイミング同期のために水晶発振回路が必要 | 水晶発振器なしでタイミング同期を実現 |
| 情報伝送に2本の信号線が必要 | 1本の信号線で情報を伝送 |
| CAN製品は有償ライセンス | 無償ライセンス |
| より複雑なソフトウェア | 物理レイヤや伝送レイヤが簡素 |
| 集積回路がより高価 | 集積回路は安価 |
表1:CANとLINの特長の比較
表1からわかるように、CANはあらゆる製品開発プロジェクトでコストの上昇と複雑さを招くことになり、複数のリモート・ノードにCANを採用するのは厳しいでしょう。この分野には「ラストワンマイルネットワーク」としてのLINが最適なソリューションです。TIのTLIN 1029-Q1やTLIN 2029-Q1などの統合LINトランシーバを使うことで、12Vや24Vで動作するすべてのアプリケーションで、低価格ネットワークの利点を活用できることでしょう。
参考資料:
車載ネットワークや24Vシステムの詳細については、次の関連資料をご覧ください。
※すべての商標および登録商標はそれぞれの所有者に帰属します。
※上記の記事はこちらのBlog記事(2018年1月18日)より翻訳転載されました。
* ご質問はE2E 日本語コミュニティにお願い致します。
