Other Parts Discussed in Thread: INA2180-2181EVM, , INA240
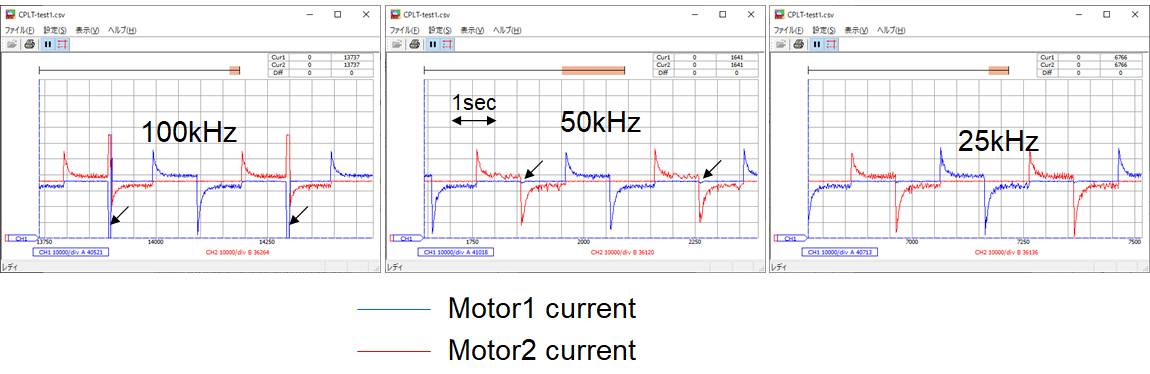
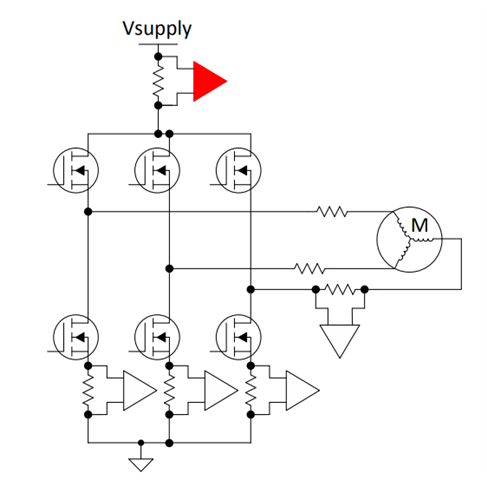
•Two motors are drove alternately with their currents monitored by INA2181A1IDGSR (R=50mΩ, Imax=2A) .
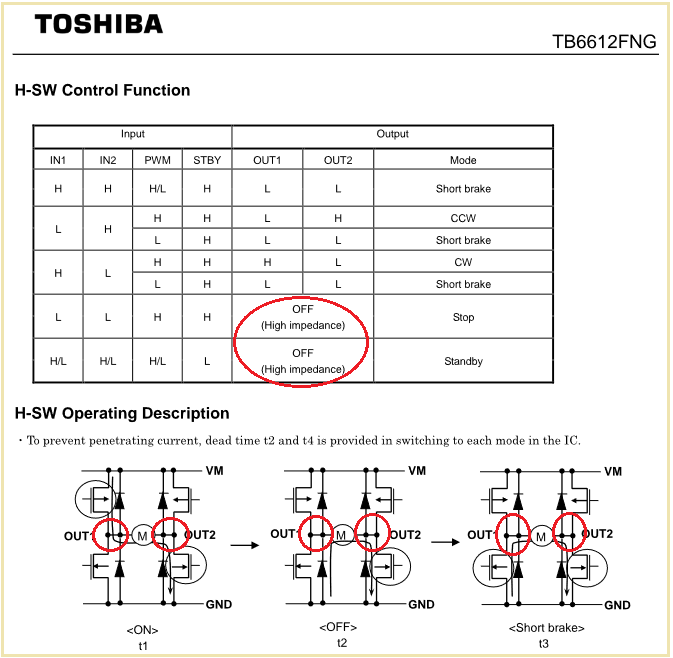
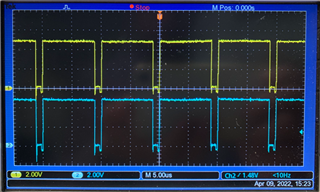
•Crosstalk of IN2 --> IN1 is big, while no crosstalk of IN1 --> IN2.(IN1 is connected to Motor1 and IN2 to Motor2)
•Crosstalk is roughly proportionate to PWM frequency.
•Is there any good way to reduced the crosstalk ?