Other Parts Discussed in Thread: THP210, , TLV2186, OPA333, OPA1637, TINA-TI
Hello,
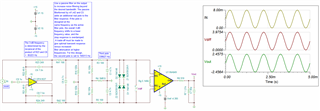
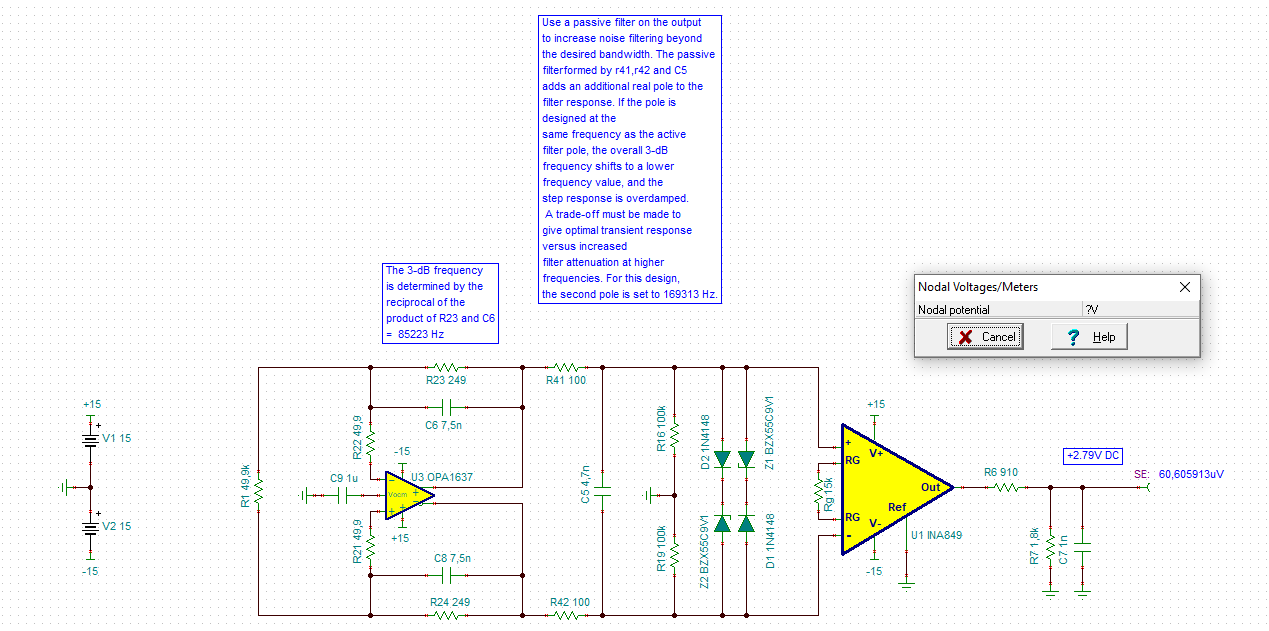
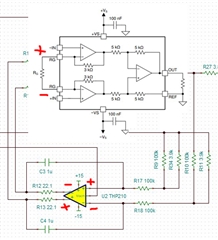
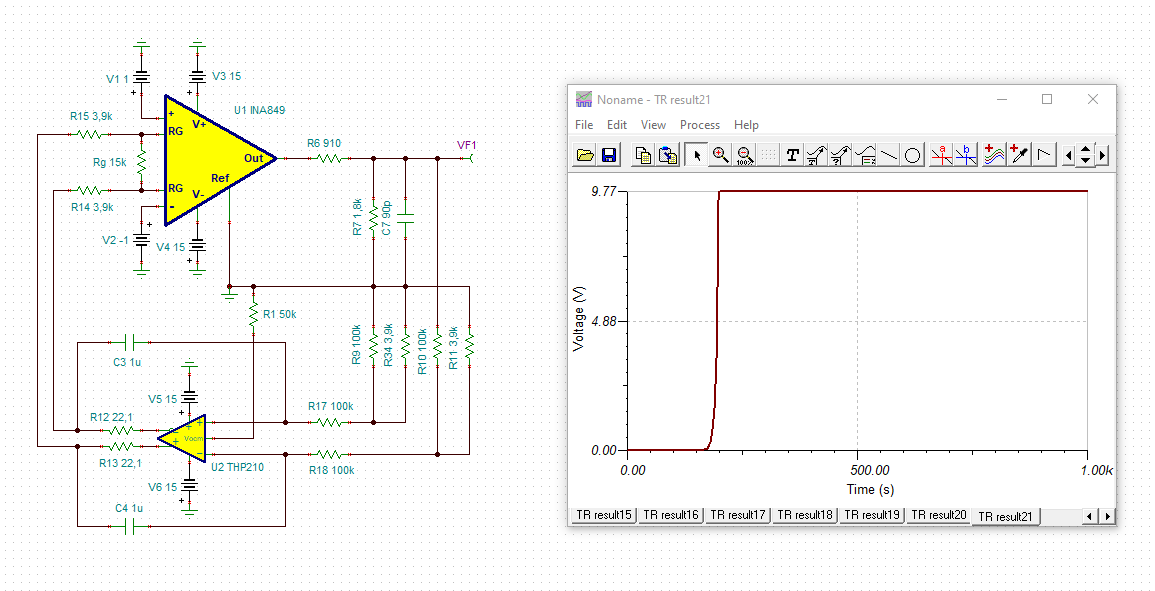
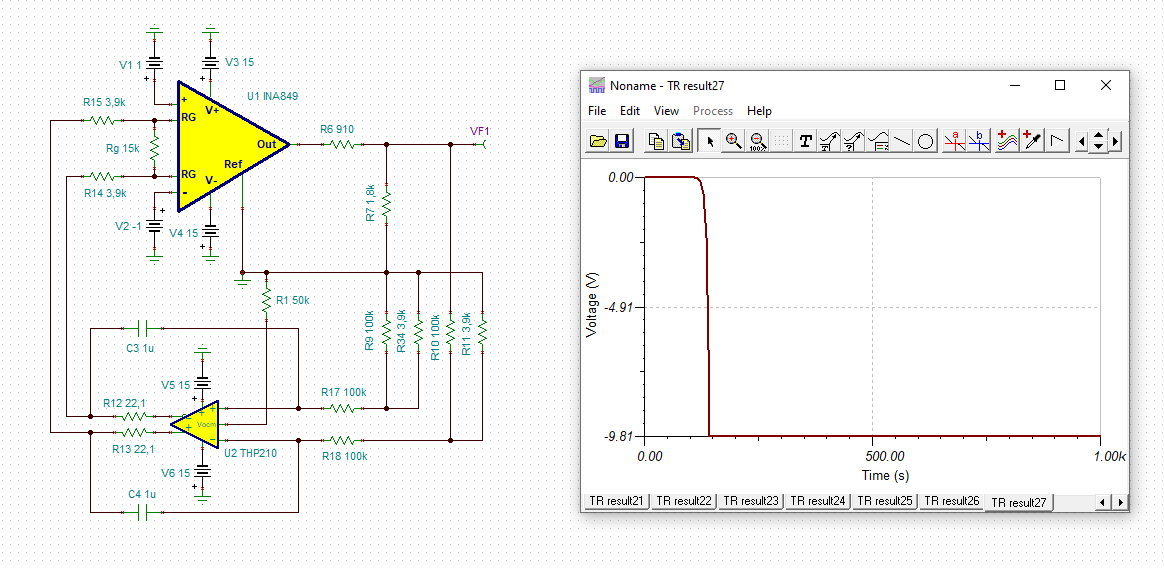
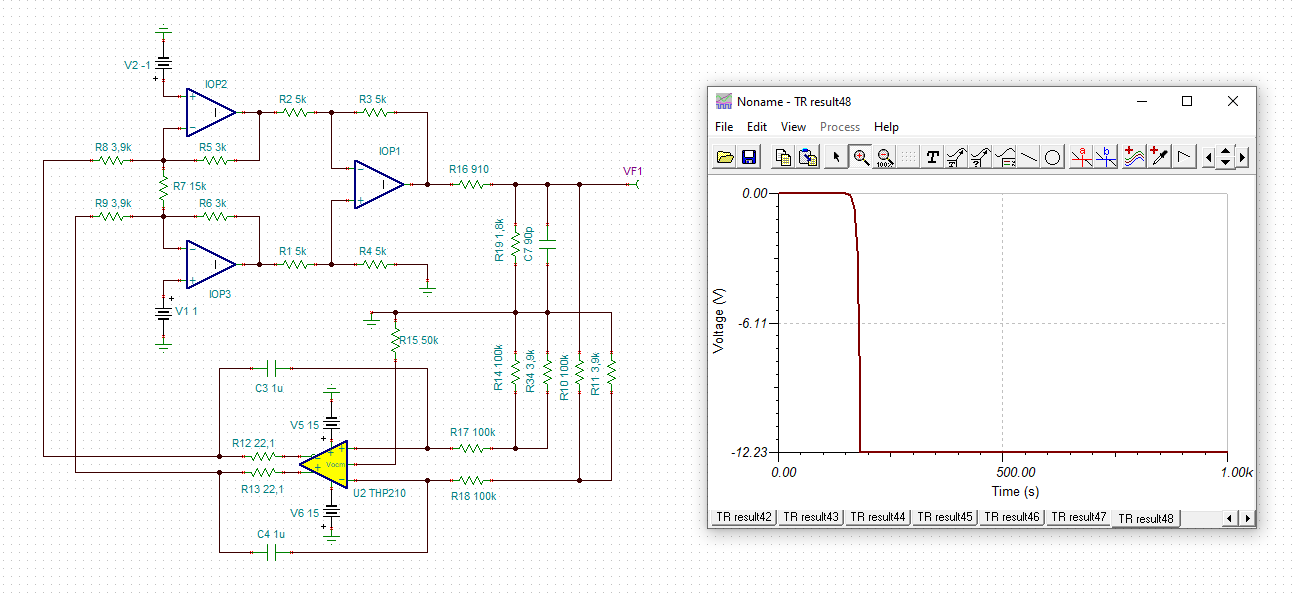
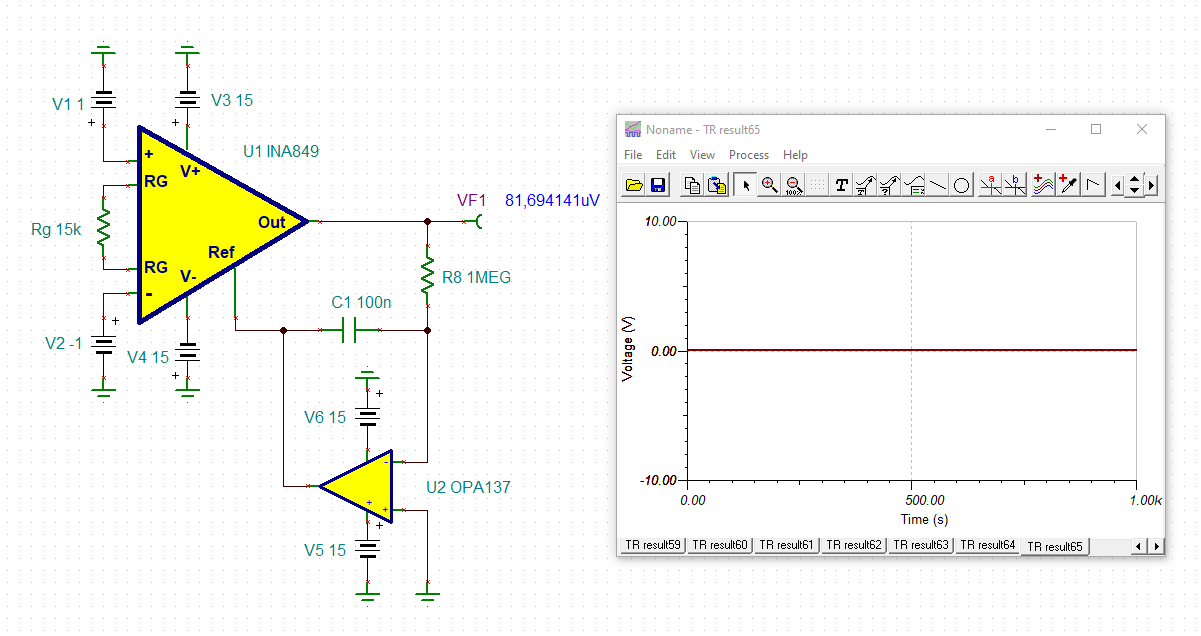
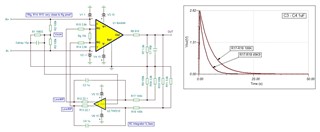
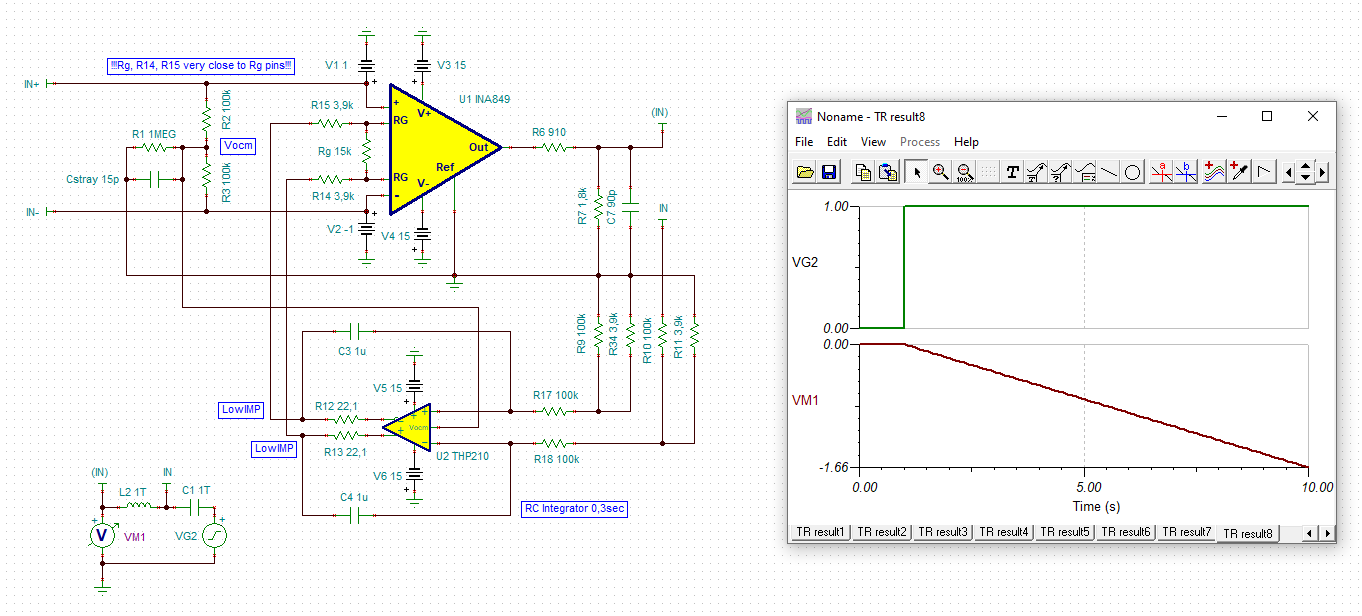
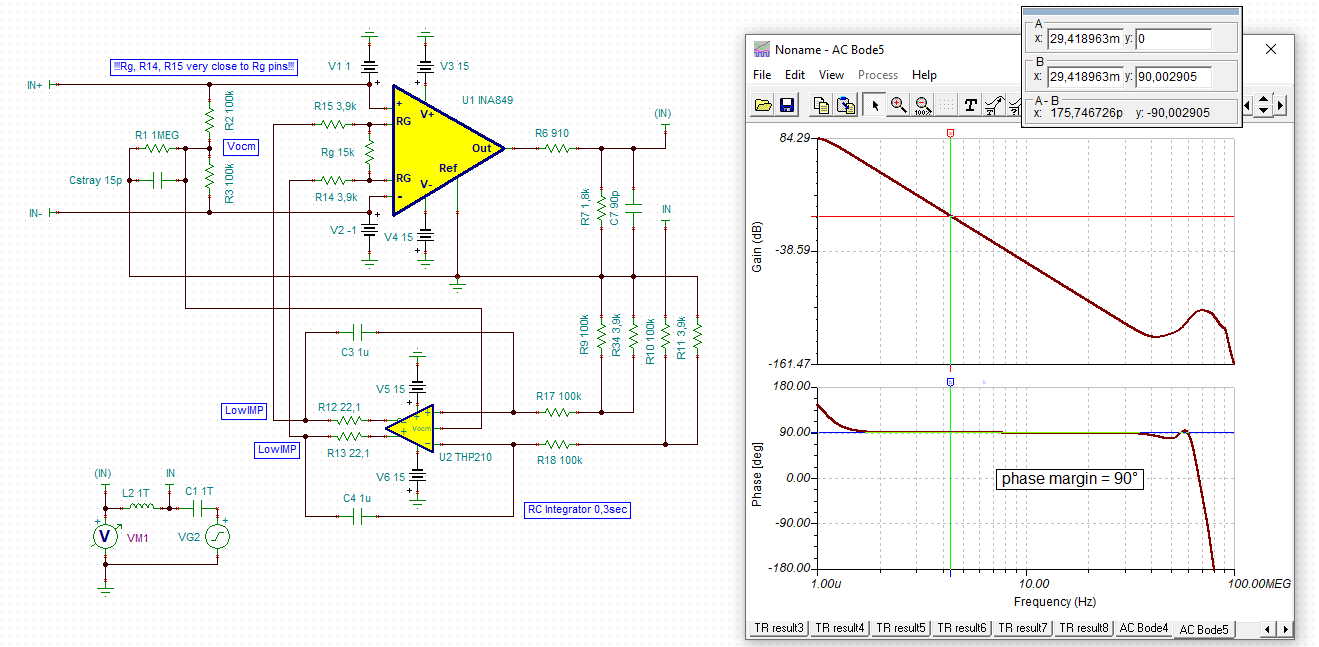
I have problem with DC servo, in Tina simulation everything is working correctly buton real world I have DC fully to the rails on INA RG pins and half of that at negative DC at the INA output!! That happen starting wrom DC null volts and after 10-20 secconds fully to the rails! Can you please tell me maybe RG pins on INA have somehow wrong + and - in sim model? Or maybe THP210 have wrong + and - in sim model? Here is my simulation. Thank you for any information regarding this isue wFullyDIFF I-V INA849 DCservo.TSCith DC servo!