Other Parts Discussed in Thread: ADS131M08, OPA388, OPA2189, THP210, OPA189, OPA392, REF6225, ADS131M08EVM
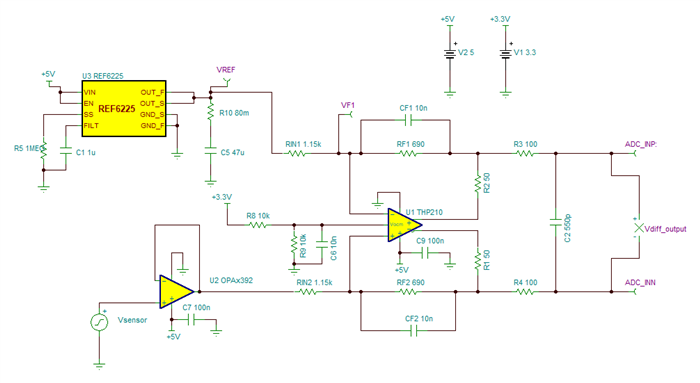
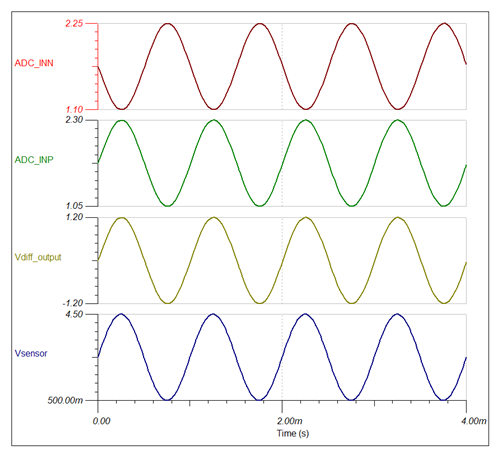
I am interfacing my TI ADC ADS131M08 with a sensor that gives out 0.5V to 4.5V signal.
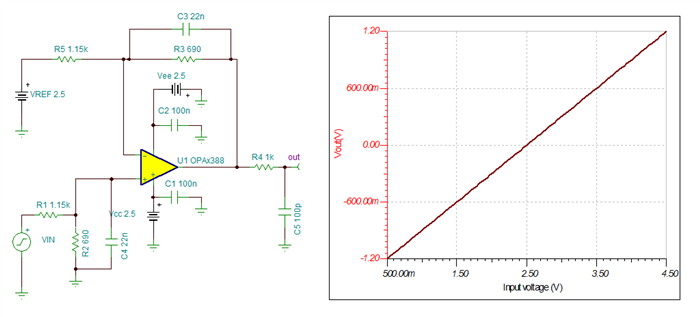
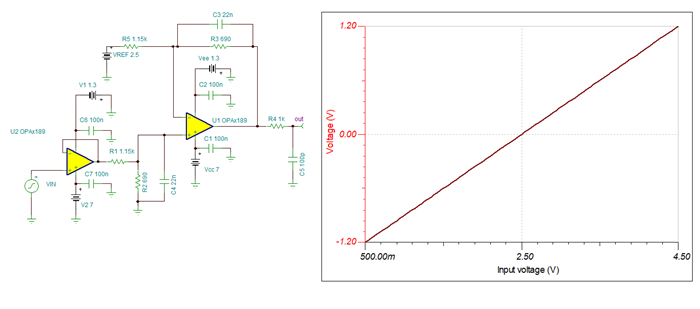
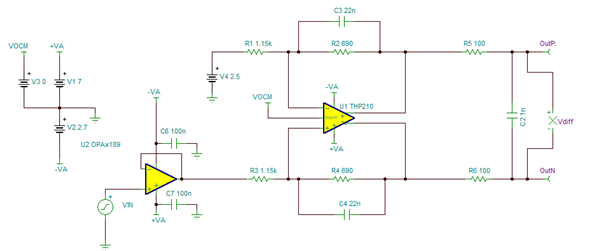
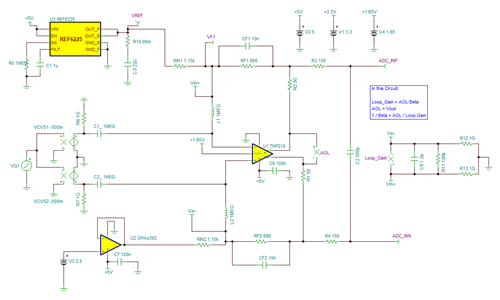
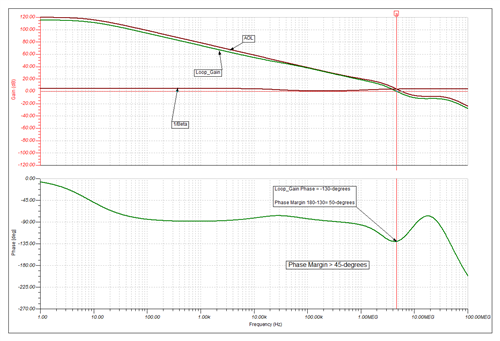
I am looking to find a high precision (ultra low noise, low drift) level translator circuit that can convert this voltage to -1.2V to 1.2V range that is suitable for ADC131M08 A/D converter.
Is there a part I can use for this purpose or a suggested circuit or application note that have recommended design,
Thanks