Other Parts Discussed in Thread: TINA-TI, THS4032
Hi there,
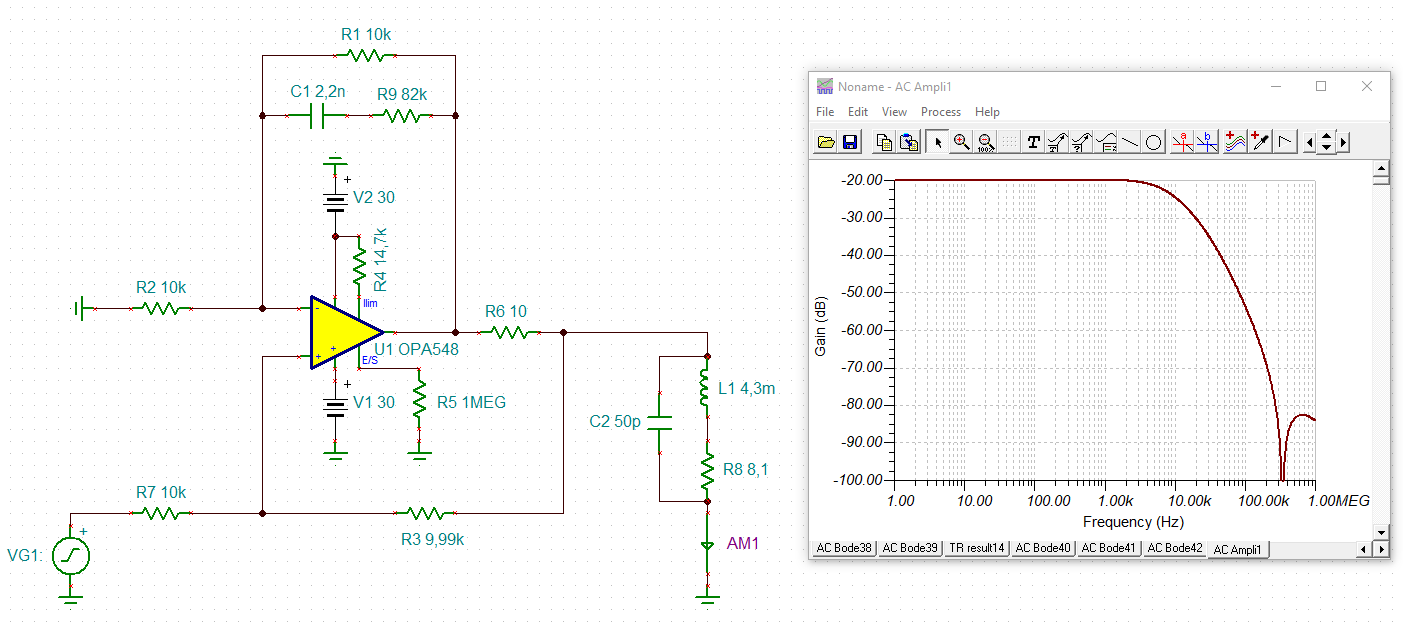
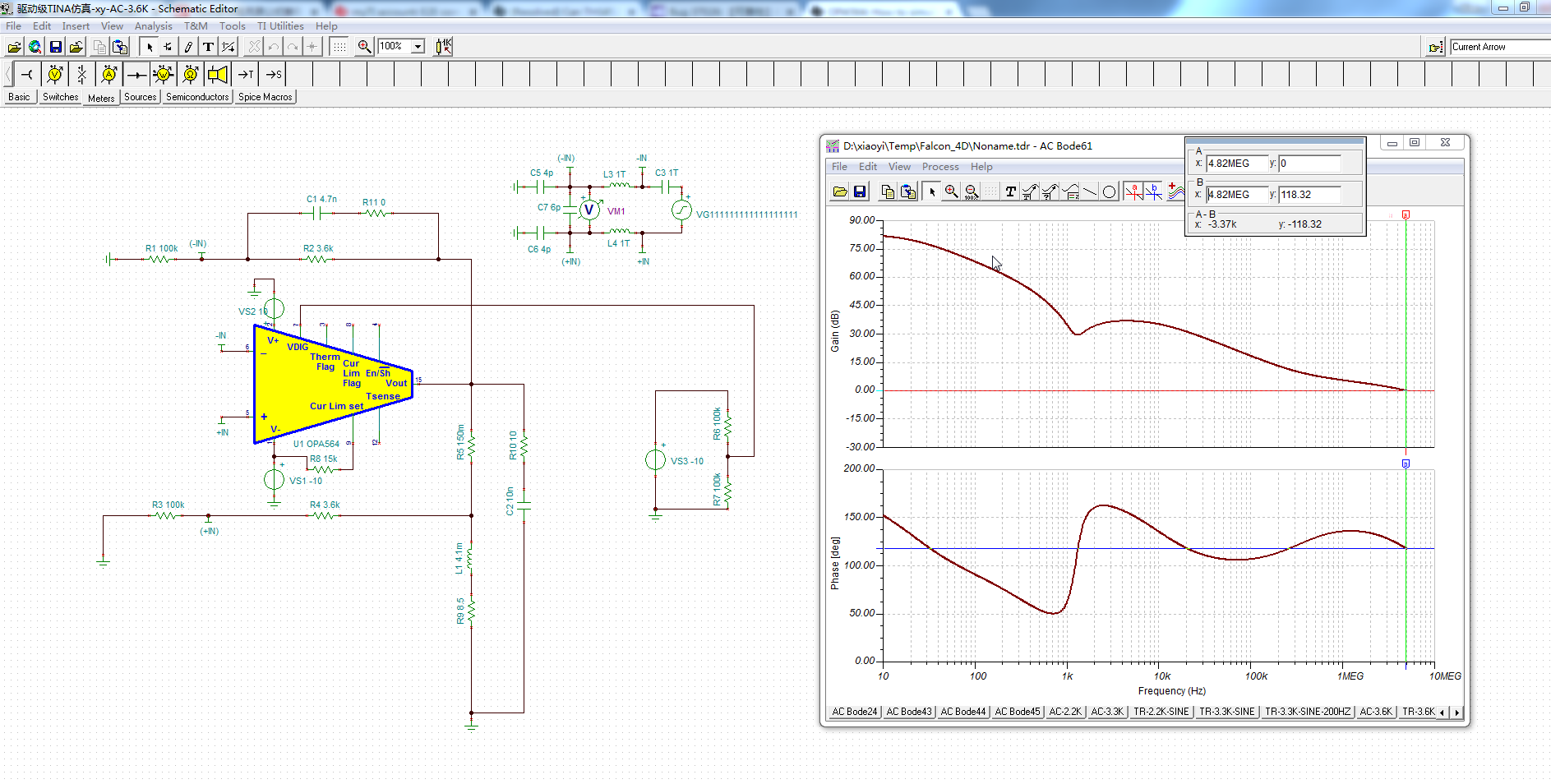
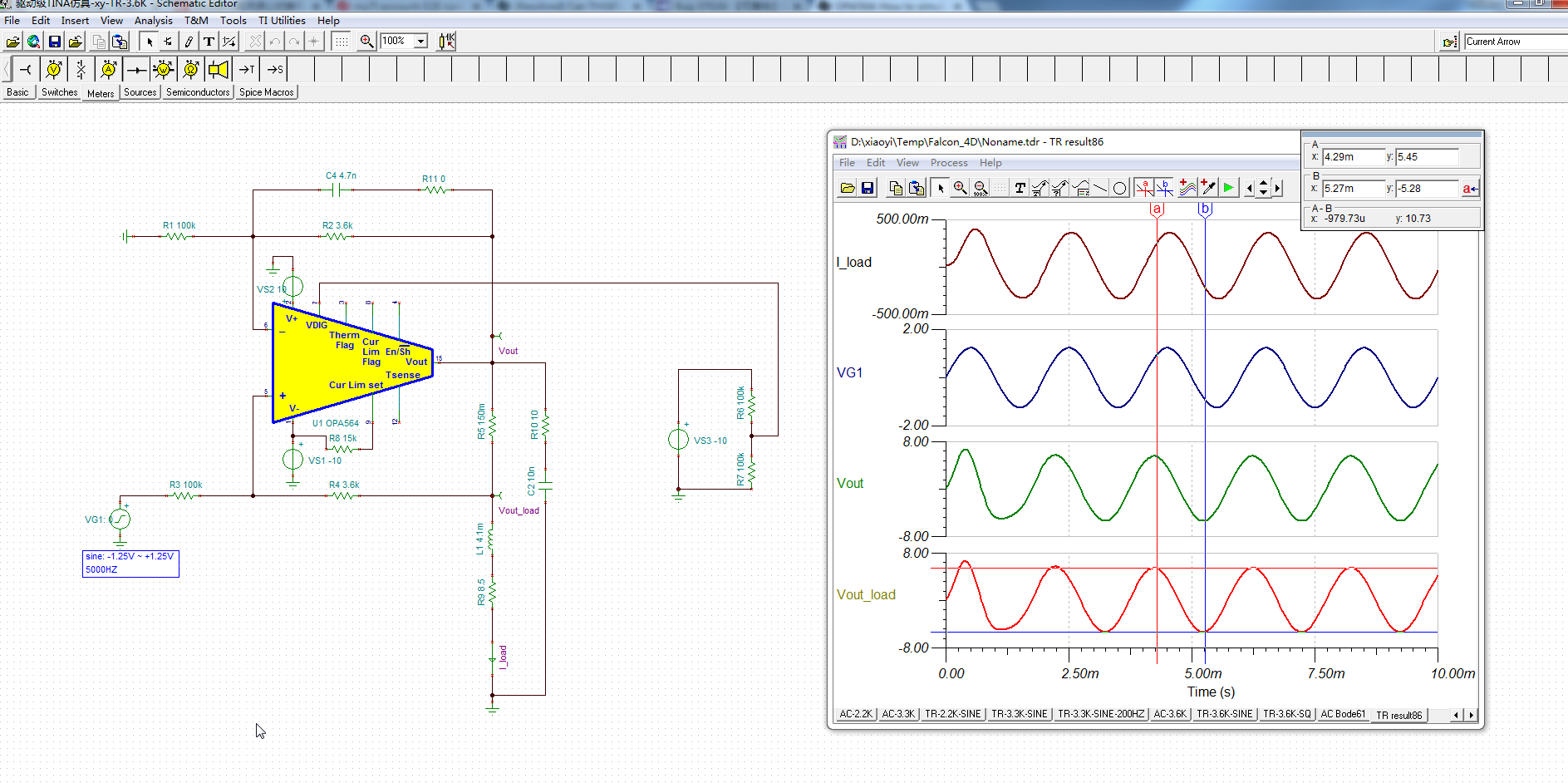
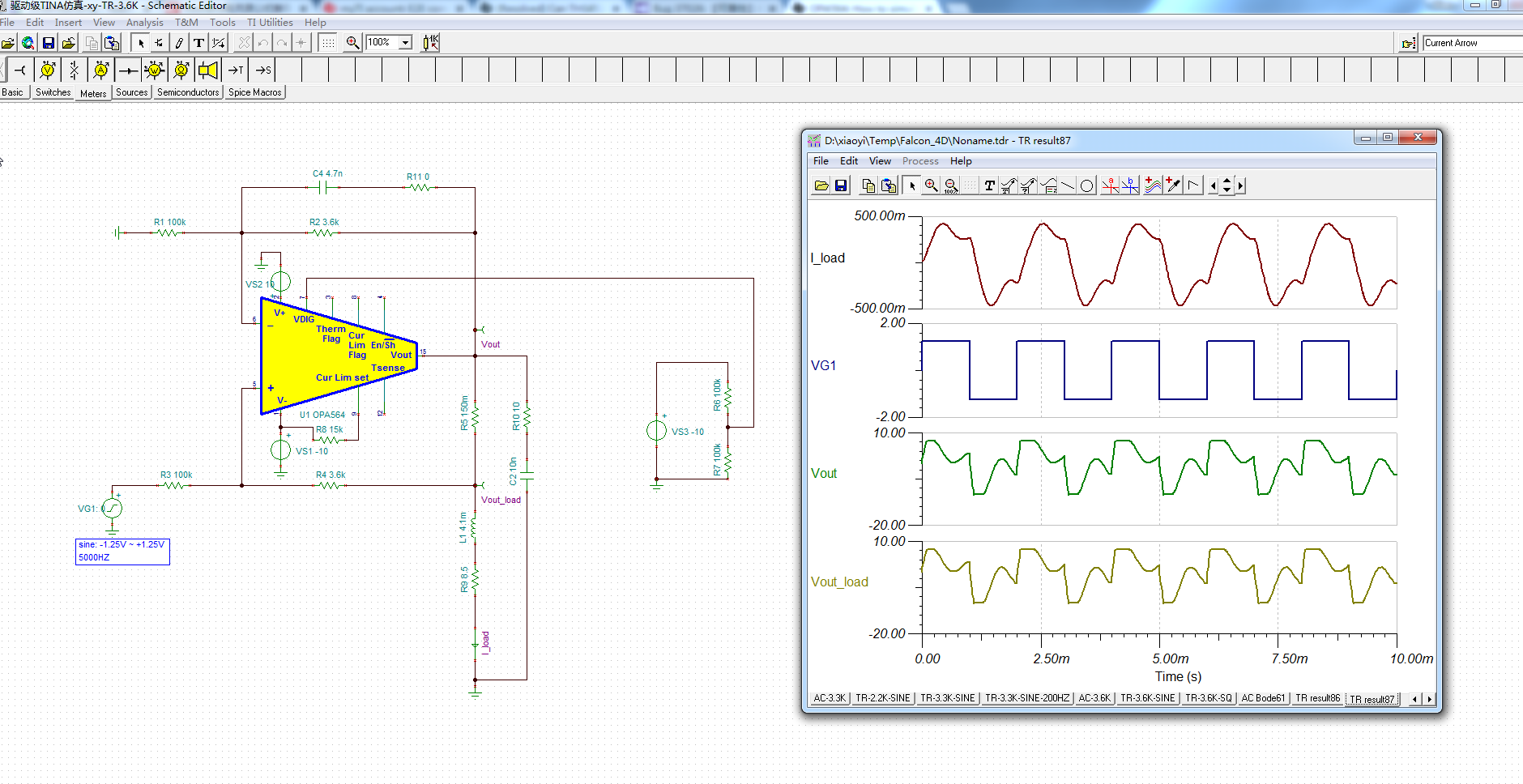
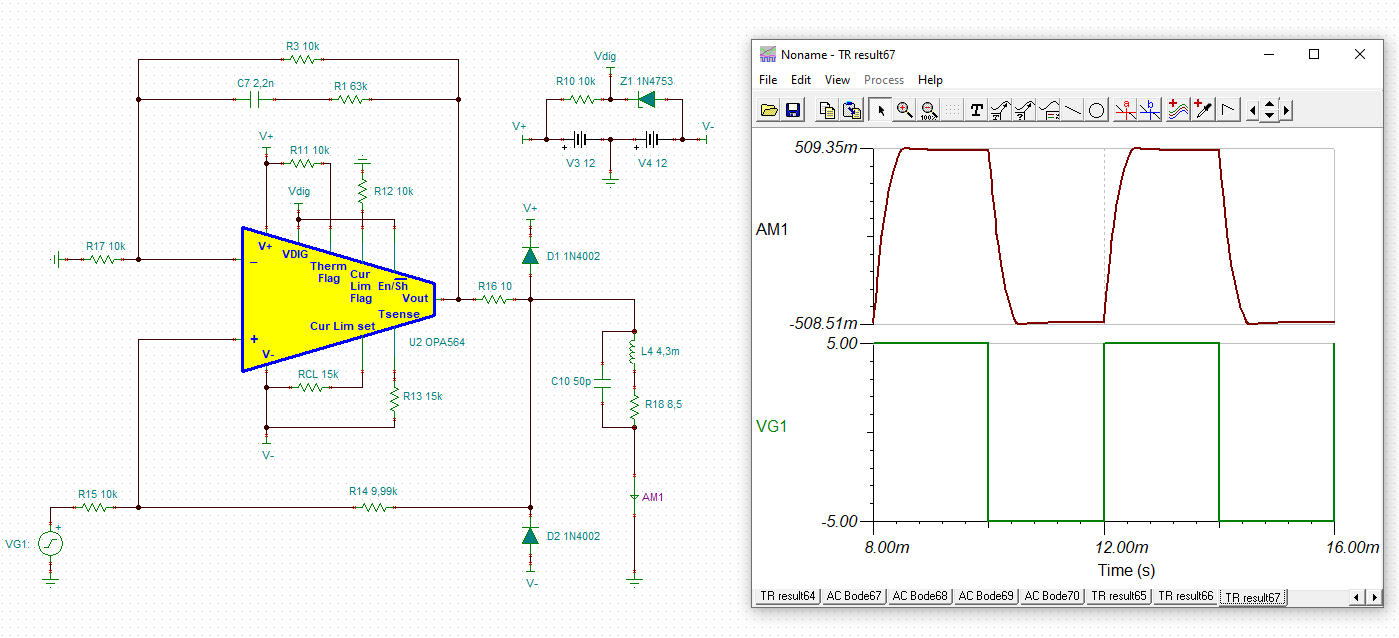
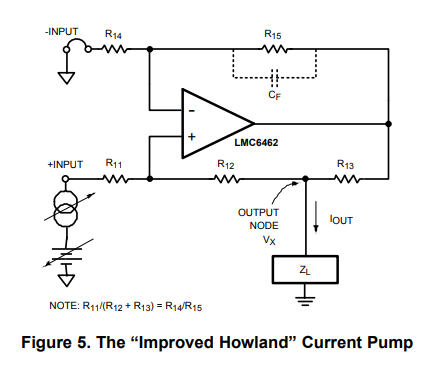
we will use two OPA564 configured as improved howland current source (SCH is refered to TI snoa474a Figure5. ), to drive two step motor coils (8.1ohm + 4.3mH), and we need to simulate the stability of this circuits.
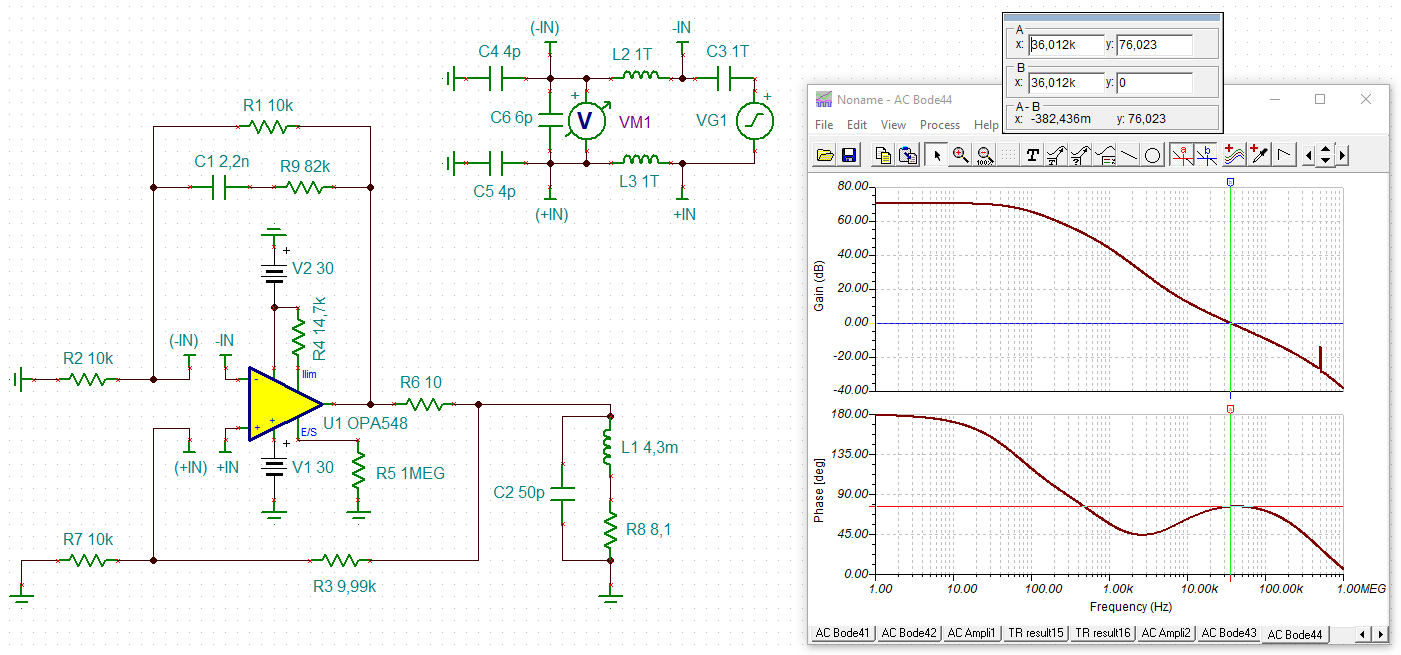
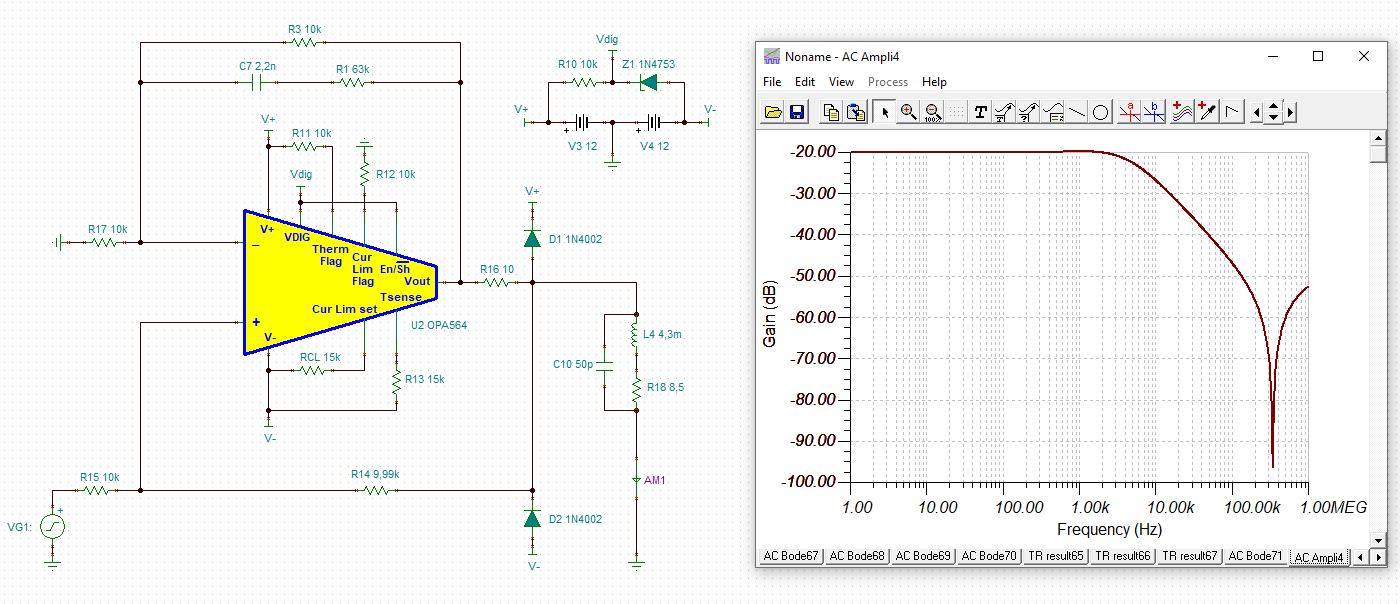
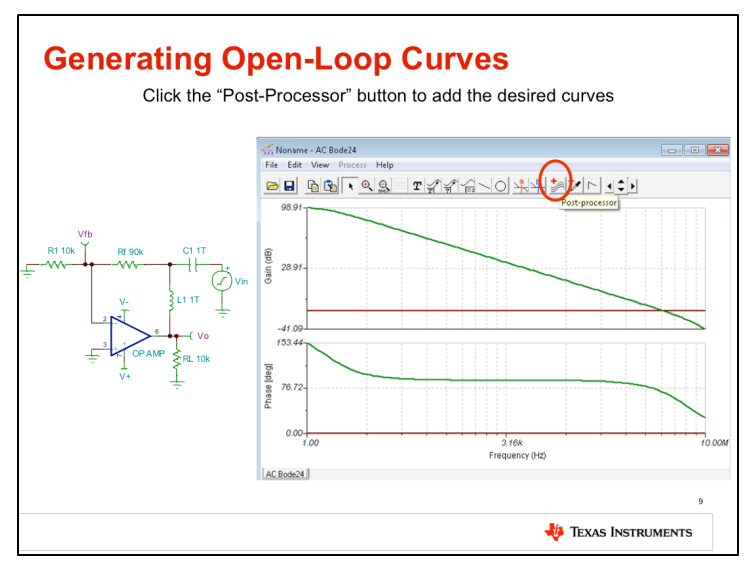
Although I learned on TI precision lab video 10.3 section, in simulation we should break the loop by using huge L and C in order to get loop-gain (as below), but I have trouble on how to do this "break" on a howland circuit, because it is containing both negative and positvie feedback paths.
I searched on this forum and found this relaed original post(https://e2e.ti.com/support/amplifiers/f/14/t/678722) where Tim Green1 attached a 5047.OPA549 Howland Stability.pptxmay related to my question, but I did not understand the simulation configuration very well, hope some expert may help explain.
Any advice is welcome, thanks a lot !