A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
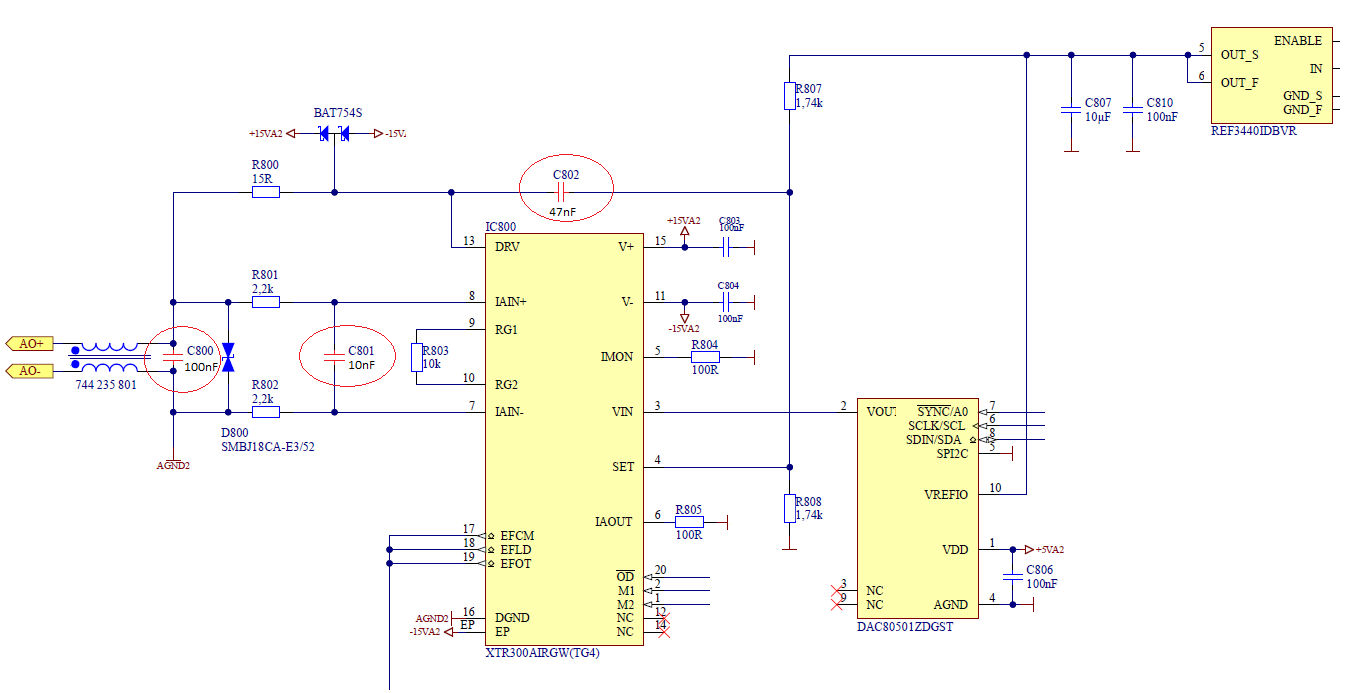
Part Number: XTR300 Other Parts Discussed in Thread: DAC80501
Hi,
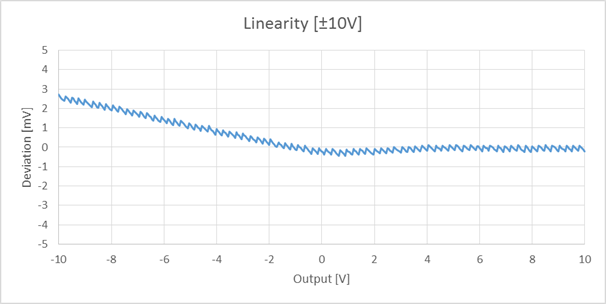
our analog output (±10V, ±22mA) with XTR300 and DAC80501 shows a rather weak linearity. Does this come from the XTR300 and could we improve the linearity?
The expected voltage gain non-linearity is specified to be +/-0.01% typical and +/-0.1% maximum of Full-Scale; therefore the 3mV deviation is inside the specification; it corresponds to an error of 0.015% of the +/-10V full-scale range.
The linearity error for current mode is specified to be a typical +/-0.01% typical and +/-0.1% maximum of the +/-24mA full-scale. Therefore a 10uA deviation out of a +/-22mA output full-scale range would be inside the specification, it corresponds to a 0.023% error of full-scale range.
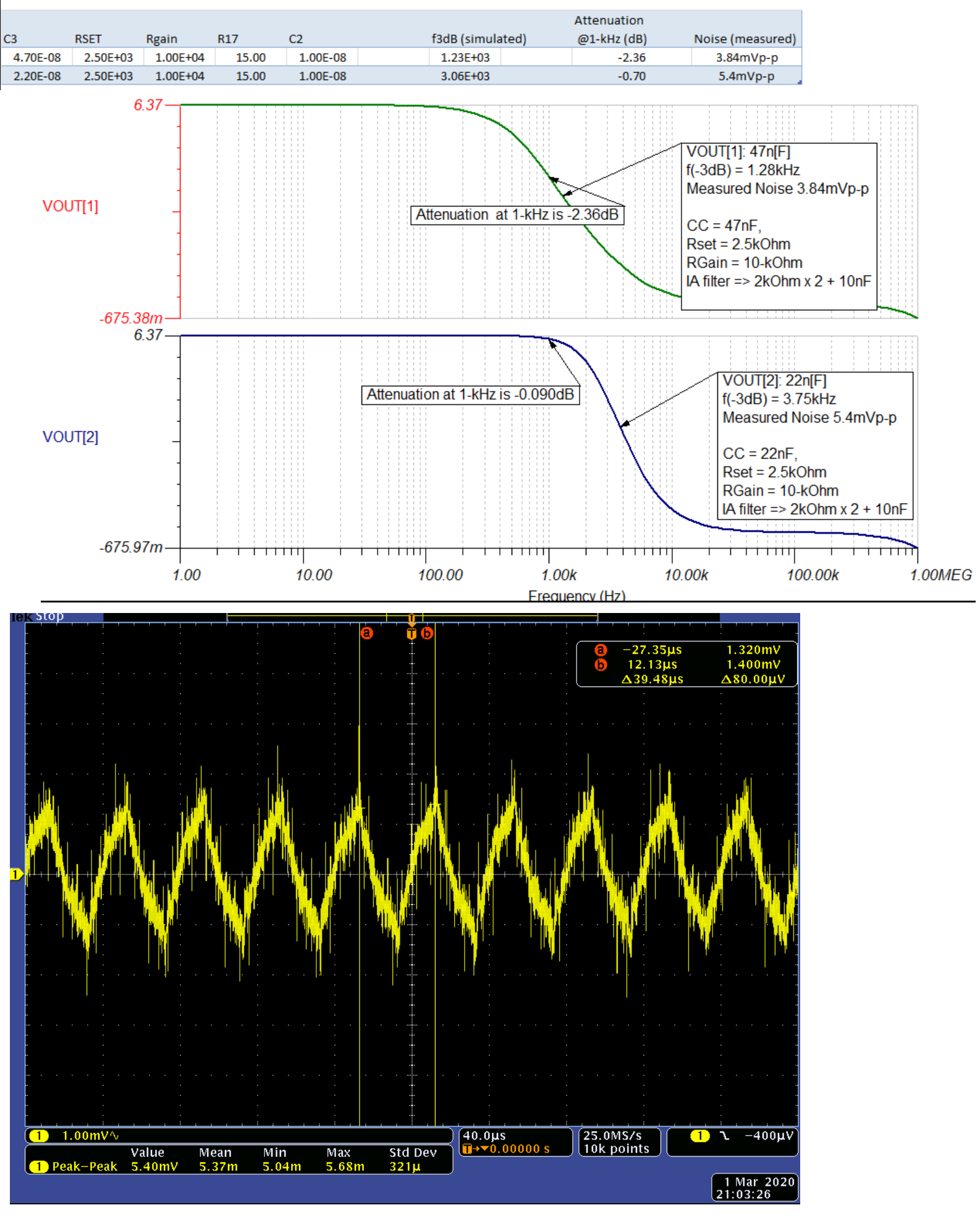
The XTR300 architecture is able to achieve very high DC precision by using an internal cycling chopper technique; and a small portion of the switching chopping noise glitches appear at the DRV output, and also at the I(MON) and IA(MON) outputs. The datasheet discusses the chopper switching noise on page 23-24. Also, if we look at the input referred noise spectrum of the device on both voltage, and current mode, the noise plots on Figure 17, 19, 21 of the datasheet show noise components in the spectrum around ~20-kHz.
In general, the compensation CC feedback capacitor with the parallel combination of Rset/Ros play a role in the stability and bandwidth of the circuit and the RC filter at the DRV output. These components also help reduce the chopper noise with the trade-off of reducing bandwidth.
There is a XTR300 TINA Spice macro-model on the product web page, and this model is quite helpful since it allows to verify functionality/configuration, gain, bandwidth, circuit configuration; and stability as they model small-signal frequency response. However, the TINA models do not incorporate the chopper noise contribution. The reason is because this is a complex noise transient behavior that is probably challenging to accurately incorporate on a simplified TINA model.
You could look possibly into placing a higher order low pass filter at the device output, and/or increase the feedback capacitor to reduce the bandwidth and reduce noise, while still attempting to keep enough BW for the signal of interest in your application. However, some level of the chopper noise will be expected at the outputs of the XTR300 using a simple single pole RC filter.
For example, using the default XTR300EVM configuration with C3 = 47nF, the circuit has a simulated f(-3dB) corner frequency of 1.23-kHz. The measured output noise (using oscilloscope) is ~3.84-mVpp as shown below. Please see AC small signal simulation simulation results for C3 = 47nF and C3 = 22nF; and the noise measurement result when using C3 = 22nF. The IA filter was left unmodified with the differential filter with C1 = 10nF and the 2x 2kOhm resistor.