I'm having Problems to get the SPI Communication running between the uC and the ADS8166.
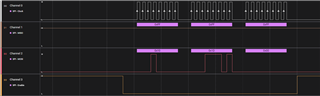
I am trying to read some register for test and have looked at the sent message on the MOSI line with a Logic Analyzer. The message actually looks exactly as described on p. 42 in the data sheet. But I don't get any response on the MISO line.
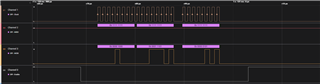
I try this sequence.
1. first I send the NOP bit (this is only because the communication does some strange things at the beginning and this was the try to give the IC time to initialize -> as shown in the screenshots)
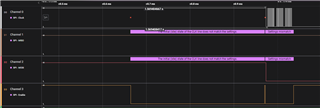
2. then at which address I want to read
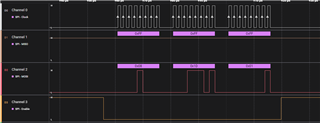
3. again a NOP bit.
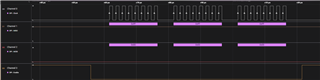
Actually I should now read the register 1D after the last message which should return only 0's because it is not initialized with anything.
Could you tell me if there could still be a problem with the message? Hardware technically I have ruled out an error in the meantime.