- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
Tool/software:
Hello.
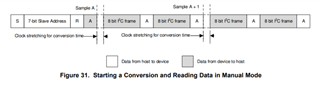
I'm fighting with the ADS7128 I2C ADC, and I'm unable to get the RMS to work. Reading Recent value works for me (on channels 0-2 which I use).
I tried to look for some example, but on github there is only .h file (which is even missing RMS_DONE and RMS_EN definitions) and no C code.
For faster testing, I'm using Python now, but the flag RMS_DONE (0x10) in SYSTEM_STATUS register is never 1.
Here is the Python example:
Thank you