


Other Parts Discussed in Thread: TCAN1043
Hi,
I have two question related to fault condition -
I have a processor interfaced with transceiver (TCAN1043HGDQ1) and also I have connected microchip CAN analyser on the same bus.
1. Refer section 10.3.6 CAN Bus Failure Fault Flag in datasheet, it says 'These failures are detected while transmitting a dominant signal on the CAN bus' when any of the six condition is true:
1. CANH bus pin shorted VSUP
2. CANH bus pin shorted VCC
3. CANH bus pin shorted GND
4. CANL bus pin shorted VSUP
5. CANL bus pin shorted VCC
6. CANL bus pin shorted GND
Does this means that fault will occur only when processor is transmitting data on TXD pin of TCAN1043HGDQ1 and any of the six condition is true? or also it will detect fault when CAN analyser (any other node on the same bus) is transmitting data on CAN bus ?
I tested both conditions, nFAULT is triggered (LOW) only when data is transmitted on TXD pin of TCAN1043HGDQ1 and nFAULT is HIGH when data is transmitted by any other node on the same bus.
2. Can I have the expected nFAULT signal so that I can compare it with what I can see?
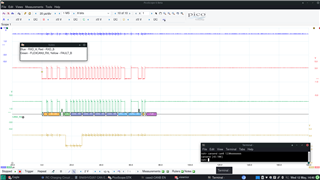
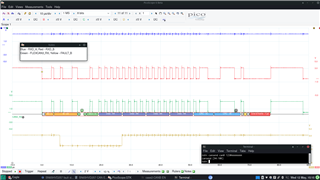
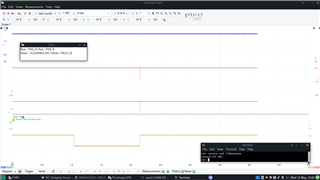
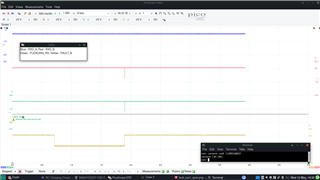
I have attached all four signal which I can see on the scope.
In the attachment, Green is the transmit data and Yellow is the nFAULT signal.
When CAN_LO is shorted to GND and when CAN_HI shorted to VCC, nFAULT is low for just few cycles. In this case other nodes connected on the same bus receive data even after nFAULT is LOW. I do not understand why other nodes should receive data when fault condition has occurred. Can you please justify?
CAN_LO shorted to GND:
CAN_HI shorted to VCC:
When CAN_LO is shorted to VCC and when CAN_HI shorted to GND. nFAULT goes low immediately when data is transmitted unit fault condition is cleared. This seems to be correct.
CAN_LO shorted to VCC:
CAN_HI shorted to GND:
Hope to hear from you soon.
Thank you,
Khyati
