


Other Parts Discussed in Thread: TCAN330
HI,
we updated our hardware from ATA6561-GAQW-N to TCAN330 transceiver
ATA6561 is working with +5V supply
TCAN330 is working with +3.3V supply.
Now our CAN communication is not woring with the TCAN330.
The Bus analyser shows "Stuff Bit Errors".
This looks like some problems with the bus timing.
We us:
- Boud rate is 250 kbps
- CAN-OPEN protocoll.
- PIC32MK1024MCF100 controller.
Waveform on bus looks OK.
Are there some special timing options that we have to use with the TCAN330?
Our acutal timing is:
- Sample Point: 85%
- Propagation SementTime (nS): 1600
- Total Time Quanta(TQ) : 20
- Sync Segment(TQ) : 1
- Propagation Segment (TQ) : 8
- Phas 1 Segment(TQ) : 8
- Phas 2 Segment(TQ) : 3
- Synchronization Jump Width(QT): 3
- Time Quanta(ns): 200.000
Wiring of the transceiver: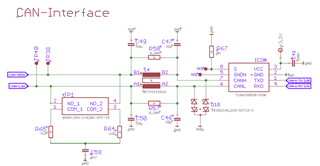
Regards
Christian
