- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.

Hi,
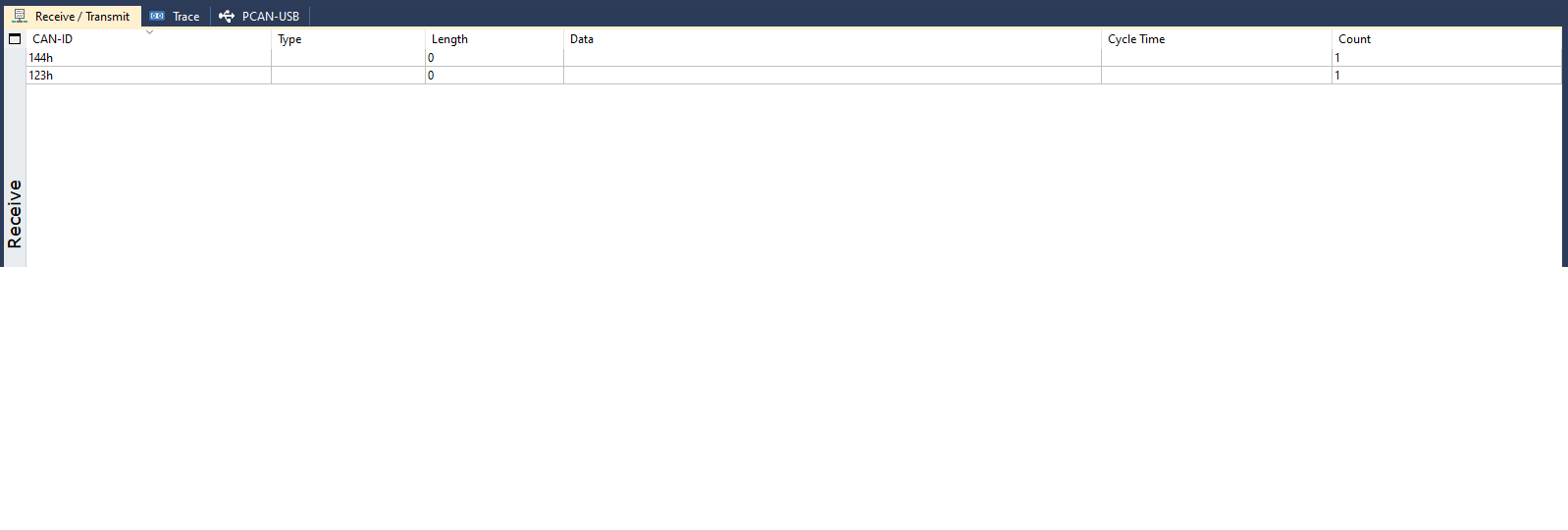
I am working on TCAN4550 with NXP(i.mx 8M Nano board) to be able to transmit and receive the CAN messages .I am using PCAN simulator to see the transmitted and received CAN messages. I am able to receive the message from TCAN board to NXP board but while transmitting the CAN messages from NXP board to TCAN board am able to send 0 length payload to TCAN4550(CAN message with its message id and Length =0 received on simulator).I have attached screenshot of PCAN simulator .your guidance will be highly appreciated.