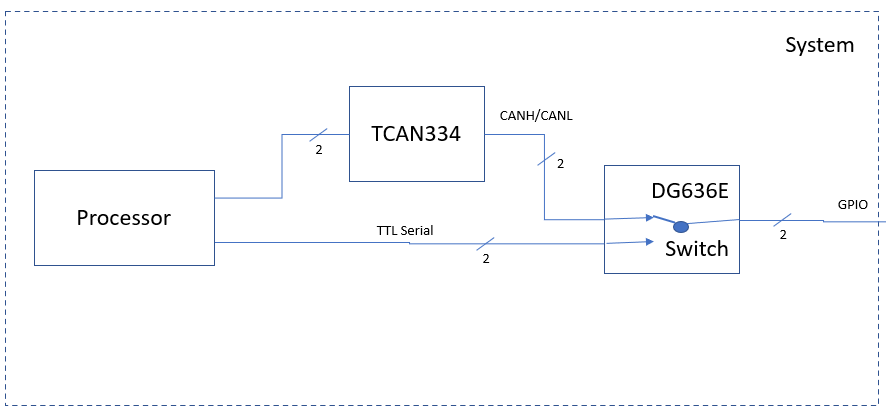
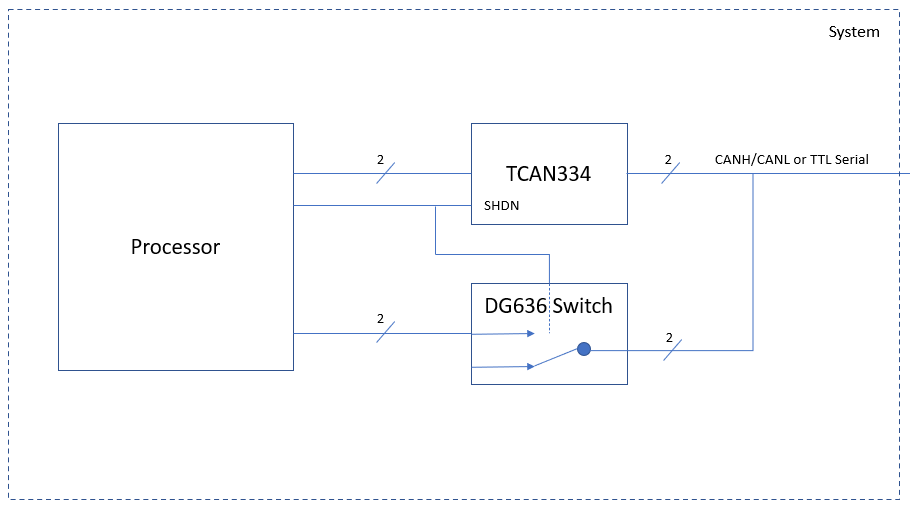
I would like to swap function of I/O pins on our product from the CANH and CANL lines of the TCAN334 to other purposes using a high speed analog switch (like the Vishay DG636E). Will this work? What problems might this cause to the CAN interface?

-
Ask a related question
What is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.