Other Parts Discussed in Thread: HALCOGEN, RM46L852
I've created an empty project for the RM46L852 and pointed HalCoGen at the project directory.
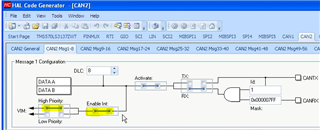
Using HalCoGen, I've selected the example code for CAN bus demonstration of interrupt-driven detection of a received message.
The source file name is example_canIntCommunication.c
I used HalCoGen to set up the messages so that CAN1 sends and CAN2 receives message ID 1.
I've already demonstrated for myself that the non-interrupt example works, the interrupt one does not.
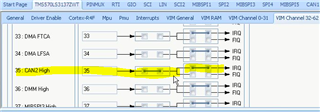
I don't see any code for connecting the interrupt function with the interrupt event.
Any hints would be greatly appreciated.