Other Parts Discussed in Thread: HALCOGEN
Hi All,
I am working on LAUNCHXL2-TMS57012 for CAN testing. I wanted to send message from CAN1 MSGBOX_1 to CAN2 MSGBOX_1. I have used the example code given in examples folder: ../HALCoGen/examples/example_canCommunication.c...
I did the exact same configuration in HALCoGen as shown in the above mentioned example code. still my code is stuck in below highlighted conditions -
canInit(); /* can1 -> can2 */
/* transmit on can1 */
canTransmit(canREG1, canMESSAGE_BOX1, tx_data);
/*... wait until message receive on can2 */
while(!canIsRxMessageArrived(canREG2, canMESSAGE_BOX1));
canGetData(canREG2, canMESSAGE_BOX1, rx_data); /* receive on can2 */
" Flag value is continously 0 from the function canIsRxMessageArrived".
NOTE - Everytime "canTransmit" function is returning Success(1).
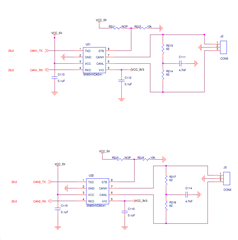
Circuit Connection - with reference to "Hercules TMS570LS12x/RM46 LaunchPad User's Guide", I have connected J10.39 (DCAN1_TX) to J10.12 (DCAN2_RX).
TMS570LS12x/RM46 LaunchPad User's Guide", I have connected J10.39 (DCAN1_TX) to J10.12 (DCAN2_RX).
TMS570LS12x/RM46 LaunchPad User's Guide", I have connected J10.39 (DCAN1_TX) to J10.12 (DCAN2_RX). Kindly suggest if I am missing somthing. Any help would be highly appreciated.