Part Number: TM4C129DNCPDT
Other Parts Discussed in Thread: UNIFLASH, TCA9555, EK-TM4C1294XL
Hi,
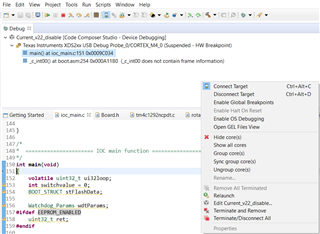
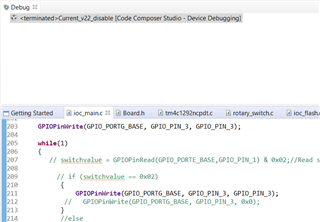
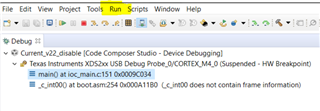
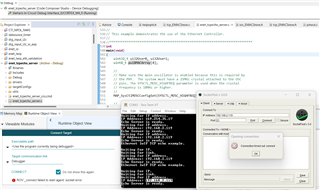
I’m trying to load a reference running code of my project in the new board but it is not working, I can’t share my project’s code here as it is proprietary so need to contact someone directly to help me debug this issue.
Thanks,
Kiranjit