


Part Number: LAUNCHXL2-570LC43
Other Parts Discussed in Thread: TMS570LC4357, HALCOGEN
Hi @jagadish gundavarapu ,
I created a project using TMS570LC4357 development board. I used Halcogen to get it done. In halcogen I selected FreeRTOS but developed my application without creating a task.
I configured external interrupts with below mentioned I/O pins :
Inputs: PA0 (with external interrupt on high side)
PA6 (with external interrupt on high side)
PA7 (with external interrupt on high side)
PB2 (with external interrupt on high side)
Outputs:
PB6 = User LED 2
PB7 = User LED 3
Execution:
Application work well when I execute the code. Attached is the main.c file for reference.
/** @file HL_sys_main.c
* @brief Application main file
* @date 11-Dec-2018
* @version 04.07.01
*
* This file contains an empty main function,
* which can be used for the application.
*/
/*
* Copyright (C) 2009-2018 Texas Instruments Incorporated - www.ti.com
*
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the
* distribution.
*
* Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
* A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
* OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
* SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
* LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
* DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
* THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
* (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
* OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
*/
/* USER CODE BEGIN (0) */
#include "HL_sys_core.h"
#include "HL_gio.h"
#include <stdio.h>
/* USER CODE END */
/* Include Files */
#include "HL_sys_common.h"
/* USER CODE BEGIN (1) */
#define false 0
#define true 1
// Define constants
#define TEETH_PER_ROTATION 50
#define CABLE_LENGTH_PER_TOOTH 1 // Length in teeths of a meter per tooth 1= 0.1 meter. 10 = 1 meter. 100 = 10 meter and so on...
#define SENSOR1 0x01
#define SENSOR2 0x02
//.... Declarations ......
boolean PB2_Flag = false;
boolean PA0_Flag = false;
boolean PA6_Flag = false;
boolean PA7_Flag = false;
boolean PROX1_A_Flag = false;
boolean PROX1_B_Flag = false;
boolean PROX2_A_Flag = false;
boolean PROX2_B_Flag = false;
uint16_t PROX1_A_Counter = 0;
uint16_t PROX1_B_Counter = 0;
uint16_t PROX2_A_Counter = 0;
uint16_t PROX2_B_Counter = 0;
uint16_t cableLengthSensor1 = 0;
uint16_t cableLengthSensor2 = 0;
char Prox1_direction = 0;
char Prox2_direction = 0;
/* USER CODE END */
/** @fn void main(void)
* @brief Application main function
* @note This function is empty by default.
*
* This function is called after startup.
* The user can use this function to implement the application.
*/
/* USER CODE BEGIN (2) */
// Function to determine direction for a specific sensor
char determineDirection(uint8_t sensor){
uint16_t Prox1A_Count = 0;
uint16_t Prox1B_Count = 0;
uint16_t Prox2A_Count = 0;
uint16_t Prox2B_Count = 0;
if(sensor == SENSOR1){
Prox1A_Count = PROX1_A_Counter;
Prox1B_Count = PROX1_B_Counter;
return (Prox1A_Count > Prox1B_Count)
? (gioSetBit(gioPORTB, 6, 1), gioSetBit(gioPORTB, 7, 0), 'A')
: (Prox1B_Count > Prox1A_Count)
? (gioSetBit(gioPORTB, 6, 0), gioSetBit(gioPORTB, 7, 1), 'B')
: (gioSetBit(gioPORTB, 6, 0), gioSetBit(gioPORTB, 7, 0), 'C');
// if(Prox1A_Count > Prox1B_Count){
// gioSetBit(gioPORTB, 6, 1); //LED 2 ON
// gioSetBit(gioPORTB, 7, 0); //LED 1 OFF
// return 'A'; // Direction A
// }else if (Prox1A_Count < Prox1B_Count){
// gioSetBit(gioPORTB, 6, 0); //LED 2 OFF
// gioSetBit(gioPORTB, 7, 1); //LED 1 ON
// return 'B'; // Direction B
// }else{
// gioSetBit(gioPORTB, 6, 0); //LED 2 OFF
// gioSetBit(gioPORTB, 7, 0); //LED 1 OFF
// return 'N'; // No clear direction detected
// }
}else if(sensor == SENSOR2){
Prox2A_Count = PROX2_A_Counter;
Prox2B_Count = PROX2_B_Counter;
return (Prox2A_Count > Prox2B_Count)
? (gioSetBit(gioPORTB, 6, 1), gioSetBit(gioPORTB, 7, 0), 'A')
: (Prox2B_Count > Prox2A_Count)
? (gioSetBit(gioPORTB, 6, 0), gioSetBit(gioPORTB, 7, 1), 'B')
: (gioSetBit(gioPORTB, 6, 0), gioSetBit(gioPORTB, 7, 0), 'C');
// if(Prox2A_Count > Prox2B_Count){
// gioSetBit(gioPORTB, 6, 1); //LED 2 ON
// gioSetBit(gioPORTB, 7, 0); //LED 1 OFF
// return 'A'; // Direction A
// }else if(Prox2A_Count < Prox2B_Count){
// gioSetBit(gioPORTB, 6, 0); //LED 2 OFF
// gioSetBit(gioPORTB, 7, 1); //LED 1 ON
// return 'B'; // Direction B
// }else{
// gioSetBit(gioPORTB, 6, 0); //LED 2 OFF
// gioSetBit(gioPORTB, 7, 0); //LED 1 OFF
// return 'N'; // No clear direction detected
// }
}else{
gioSetBit(gioPORTB, 6, 0); //LED 2 OFF
gioSetBit(gioPORTB, 7, 0); //LED 1 OFF
return 'N'; // Invalid sensor number
}
}
// Function to calculate cable length for a given sensor
uint16_t calculateCableLength(uint8_t sensor, char Prox_direction, uint16_t PROX_A_Counter, uint16_t PROX_B_Counter) {
if (sensor != SENSOR1 && sensor != SENSOR2) {
printf("Invalid sensor number\n");
return 0; // Return 0 to indicate an error
}
if (Prox_direction != 'A' && Prox_direction != 'B' && Prox_direction != 'C') {
printf("Invalid direction\n");
return 0; // Return 0 to indicate an error
}
uint16_t pulses = (Prox_direction == 'A') ? PROX_A_Counter : (Prox_direction == 'B') ? PROX_B_Counter : 0;
return (uint16_t)((pulses * CABLE_LENGTH_PER_TOOTH) / TEETH_PER_ROTATION);
}
// Function for proximity sensor 1
void Prox1(){
// Determine the direction for Sensor 1
Prox1_direction = determineDirection(SENSOR1);
cableLengthSensor1 = calculateCableLength(SENSOR1, Prox1_direction, PROX1_A_Counter, PROX1_B_Counter);
}
// Function for proximity sensor 2
void Prox2(){
// Determine the direction for Sensor 2
Prox2_direction = determineDirection(SENSOR2);
cableLengthSensor2 = calculateCableLength(SENSOR2, Prox2_direction, PROX2_A_Counter, PROX2_B_Counter);
}
/* USER CODE END */
int main(void)
{
/* USER CODE BEGIN (3) */
gioInit();
_enable_IRQ_interrupt_();
while(1)
{
Prox1(); // Proximity sensor 1
Prox2(); // Proximity sensor 2
PB2_Flag = PA0_Flag = PA6_Flag = PA7_Flag = 0; // Resetting Input flags
}
/* USER CODE END */
return 0;
}
/* USER CODE BEGIN (4) */
void gioNotification(gioPORT_t *port, uint32 bit)
{
if(port == gioPORTB && bit == 2)
{
PB2_Flag = true;
PROX1_A_Flag = true;
PROX1_A_Counter++; // Increment counters for Sensor 1 based on received signal A
}
else if(port == gioPORTA && bit == 0)
{
PA0_Flag = true;
PROX1_B_Flag = true;
PROX1_B_Counter++; // Increment counters for Sensor 1 based on received signal B
}
else if(port == gioPORTA && bit == 6)
{
PA6_Flag = true;
PROX2_B_Flag = true;
PROX2_B_Counter++; // Increment counters for Sensor 2 based on received signal B
}
else if(port == gioPORTA && bit == 7)
{
PA7_Flag = true;
PROX2_A_Flag = true;
PROX2_A_Counter++; // Increment counters for Sensor 2 based on received signal A
}
else
{
PROX1_A_Flag = PROX1_B_Flag = PROX2_A_Flag = PROX2_B_Flag = false ;
}
}
/* USER CODE END */
--------------------
Now the Problem Statement:
I have another project which uses FreeRTOS and 2 Task are running in it.
I modified this code to configure above specified I/O pins with external interrupts.
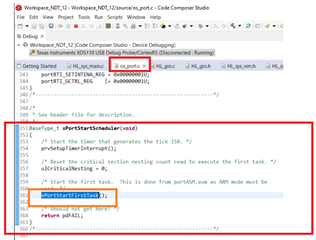
When I executed my code, it get stuck In os_port.c --> vPortStartFirstTask(); function.
Below is my freeRTOS config:

Attached is the main.c file with freeRTOS task running in it.
/** @file HL_sys_main.c
* @brief Application main file
* @date 11-Dec-2018
* @version 04.07.01
*
* This file contains an empty main function,
* which can be used for the application.
*/
/*
* Copyright (C) 2009-2018 Texas Instruments Incorporated - www.ti.com
*
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the
* distribution.
*
* Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
* A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
* OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
* SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
* LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
* DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
* THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
* (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
* OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
*/
/* USER CODE BEGIN (0) */
/* USER CODE END */
/* Include Files */
#include "HL_sys_common.h"
/* USER CODE BEGIN (1) */
/* FreeRTOS scheduler files */
#include "FreeRTOS.h"
#include "FreeRTOS_UDP_IP.h"
#include "os_task.h"
#include "FreeRTOS_sockets.h"
#include "os_timer.h"
#include "HL_emac.h"
#include "HL_hw_reg_access.h"
#include "HL_spi.h"
#include "HL_gio.h"
#include "HL_sys_pmu.h"
#include "HL_adc.h"
/* Console IO Support */
#include "HL_sci.h"
#include <stdint.h>
#include <string.h>
#include <stdio.h>
/* Simulink header */
#include "Hercules.h"
/*Maths Operations */
#include "math.h"
/** DEFINE **/
#define sciREGx sciREG1
#define clearScreen() printf("\033[H\033[J")
#define gotoxy(x,y) printf("\033[%d;%dH", (x), (y))
#define DEBUG_STRING_BUFFER_SIZE 1024
uint8_t txtCRLF[] = {'\r', '\n'};
char printBuffer [512];
#define DebugOn 0
#define false 0
#define true 1
//AD7175_8_Setup
#define NumEnabledChannelsBitMask 15 // binary bit mask value for number of channels enabled
#define cNDT1SensorCH 0
#define cNDT1NoiseCH 1
#define cNDT2SensorCH 2
#define cNDT2NoiseCH 3
// Proximity sensor definitions .....
#define TEETH_PER_ROTATION 50
#define CABLE_LENGTH_PER_TOOTH 1 // Length in teeths of a meter per tooth 1= 0.1 meter. 10 = 1 meter. 100 = 10 meter and so on...
#define SENSOR1 0x01
#define SENSOR2 0x02
/* Define the network addressing. These parameters will be used if either
* ipconfigUDE_DHCP is 0 or if ipconfigUSE_DHCP is 1 but DHCP auto configuration
* failed. */
//Set to static IP for se on current scaler setup
//[TODO] Update IP address to Scaler assigned
//static const uint8_t ucIPAddress[ 4 ] = { 10, 0, 0, 98 };
//static const uint8_t ucNetMask[ 4 ] = { 255, 255, 255, 0 };
//static const uint8_t ucGatewayAddress[ 4 ] = { 10, 0, 0, 138 };
//static const uint8_t ucDNSServerAddress[ 4 ] = { 10, 0, 0, 100 };
static const uint8_t ucIPAddress[ 4 ] = { 192, 168, 169, 8 };
static const uint8_t ucNetMask[ 4 ] = { 255, 255, 255, 0 };
static const uint8_t ucGatewayAddress[ 4 ] = { 192, 168, 169, 204 };
static const uint8_t ucDNSServerAddress[ 4 ] = { 192, 168, 169, 204 };
/* SPI variables */
uint16_t txSPIbuffer[]= {0x0,0x0,0x0,0x0,0x0};
uint16 txDataLowByte = 0;
uint16 txDataHighByte = 0;
uint16_t rxBuffer[10];
uint16_t BufId = 0;
spiDAT1_t AD7175_8_Setup_dataconfig; // 8 bits for command
spiDAT1_t AD7175_8_data_recv_dataconfig; // 8 bits segments for data
uint32_t spiCommand = 0;
uint32_t spiData = 0;
uint16_t rxSPIbuffer[5]; // Buffer structure with WL not set. FIrst 24Bits is Signal Reading, nest 8bits is the status register when Data_STAT is set, the last 8bits are the CRC, when CRC is enabled
uint16_t rxSPIstatusBuffer[2]; // Buffer structure with WL not set. FIrst 24Bits is Signal Reading, nest 8bits is the status register when Data_STAT is set, the last 8bits are the CRC, when CRC is enabled
char strNDTSensor1_Signal[11],strNDTSensor1_Noise[11],strNDTSensor2_Signal[11],strNDTSensor2_Noise[11];
char Bit16_Sensor1_Signal[7],Bit16_Sensor1_Noise[7],Bit16_Sensor2_Signal[7],Bit16_Sensor2_Noise[7]; // Variables declaration for 16 bit ADC resolution
uint16_t Sensor1_Signal=0,Sensor1_Noise=0,Sensor2_Signal=0,Sensor2_Noise=0; // Variables declaration for 16 bit ADC resolution
/* ADC Variables */
uint32 ch_count=0;
/* Power System Bits */
bool Latch_On = 0;
bool Power_12V_On = 0;
bool Disable_System = 0;
//.... Proximity Sensor Declarations ......
boolean PB2_Flag = false;
boolean PA0_Flag = false;
boolean PA6_Flag = false;
boolean PA7_Flag = false;
boolean PROX1_A_Flag = false;
boolean PROX1_B_Flag = false;
boolean PROX2_A_Flag = false;
boolean PROX2_B_Flag = false;
uint16_t PROX1_A_Counter = 0;
uint16_t PROX1_B_Counter = 0;
uint16_t PROX2_A_Counter = 0;
uint16_t PROX2_B_Counter = 0;
uint16_t cableLengthSensor1 = 0;
uint16_t cableLengthSensor2 = 0;
char Prox1_direction = 0;
char Prox2_direction = 0;
/*Task Initalisation Complete Statuses */
bool Task_1_Initialised = false;
bool Task_2_Initialised = false;
/* Debug */
uint8_t cString[ 150]; //55 100 ];
struct AD7175_8_Measurements{
uint32_t ADCvalue;
uint8_t StatusReg;
uint8_t CRC;
} ;
struct NDTsensors{
struct AD7175_8_Measurements Signal;
struct AD7175_8_Measurements Noise;
} ;
struct NDTRecords{
struct NDTsensors NDT1;
struct NDTsensors NDT2;
uint32_t Heartbeat;
} ;
struct NDTRecords NDTLog;
/* Task Handles */
xTaskHandle xDebugTaskHandle; // Task used to send data to a serial terminal
xTaskHandle xNetworkCommsTaskHandle; // Task to handle Ethernet network data communications
xTaskHandle xADCpollingTaskHandle; // Task to Poll analog data
xTaskHandle xSimulinkTaskHandle; // Task used to Run Simulink code. Typically Power Management
xTaskHandle xInitialisationTaskHandle; // Task Used to coordinate the intialisation of all task
xTaskHandle xAggregateTaskHandle; // Task Used to combine all tasks other than simulink
void sciDisplayText(sciBASE_t *sci, uint8_t *text)
{
size_t length = strlen ((const char *)text);
while(length--)
{
while ((sci->FLR & 0x4) == 4); //wait until busy
sciSendByte(sci,*text++); // send out text
};
}
void sciDisplayTextLen(sciBASE_t *sci, uint8_t *text,uint32_t length)
{
while(length--)
{
while ((sci->FLR & 0x4) == 4); //wait until busy
sciSendByte(sci,*text++); // send out text
};
}
void vApplicationIPNetworkEventHook( eIPCallbackEvent_t eNetworkEvent )
{
static BaseType_t xTasksAlreadyCreated = pdFALSE;
char printBuffer[256];
uint32_t ulIPAddress, ulNetMask, ulGatewayAddress, ulDNSServerAddress;
int8_t cBuffer[16];
sciDisplayText(sciREGx,"Network Status ...");
/* Check this was a network up event, as opposed to a network down event. */
if( eNetworkEvent == eNetworkUp )
{
/* The network is up and configured. Print out the configuration
obtained from the DHCP server. */
FreeRTOS_GetAddressConfiguration( &ulIPAddress,
&ulNetMask,
&ulGatewayAddress,
&ulDNSServerAddress );
/* Convert the IP address to a string then print it out. */
FreeRTOS_inet_ntoa( ulIPAddress, cBuffer );
sprintf(printBuffer,"IP Address: %s\r\n", cBuffer );
sciDisplayText(sciREGx,(uint8_t *)printBuffer);
/* Convert the net mask to a string then print it out. */
FreeRTOS_inet_ntoa( ulNetMask, cBuffer );
sprintf(printBuffer,"Subnet Mask: %s\r\n", cBuffer );
sciDisplayText(sciREGx,(uint8_t *)printBuffer);
/* Convert the IP address of the gateway to a string then print it out. */
FreeRTOS_inet_ntoa( ulGatewayAddress, cBuffer );
sprintf(printBuffer,"Gateway IP Address: %s\r\n", cBuffer );
sciDisplayText(sciREGx,(uint8_t *)printBuffer);
/* Convert the IP address of the DNS server to a string then print it out. */
FreeRTOS_inet_ntoa( ulDNSServerAddress, cBuffer );
sprintf(printBuffer,"DNS server IP Address: %s\r\n", cBuffer );
sciDisplayText(sciREGx,(uint8_t *)printBuffer);
/* Create the tasks that use the IP stack if they have not already been
created. */
if( xTasksAlreadyCreated == pdFALSE )
{
/*
* For convenience, tasks that use FreeRTOS+UDP can be created here
* to ensure they are not created before the network is usable.
*/
xTasksAlreadyCreated = pdTRUE;
}
}
else
{
sciDisplayText(sciREGx,"Network not up :(");
}
}
/** @fn void uint16buf2HexString(uint8_t * uint8buf,uint BufferLength,char * HexCharArray)
* @brief convert data to a Hex char string
* @param[in] uint8buf - Pointer to buffer of uint8_t members
* @param[in] BufferLength - unsigned integer that is the length of uint8Buf
* @param[in] HexCharArray - Pointer to char array of char members
*
* @return null.
*
* This function converts an array of 8-bit numbers to a string of Hex characters.
*
*/
static char hex[] = "0123456789ABCDEF";
void uint16buf2HexString(uint16_t * uint16buf,size_t BufferLength,char * HexCharArray){
size_t i = 0;
/*
//Forward order?
for (i = 0; i < BufferLength/2; i++)
{
HexCharArray[(((BufferLength/2-1)-i) * 2) + 0] = hex[((uint16buf[i] & 0x00F0) >> 4)];
HexCharArray[(((BufferLength/2-1)-i) * 2) + 1] = hex[((uint16buf[i] & 0x000F) >> 0)];
}
*/
//Reverese order?
for (i = 0; i < BufferLength/2; i++)
{
HexCharArray[(i * 2) + 0] = hex[((uint16buf[i] & 0x00F0) >> 4)];
HexCharArray[(i * 2) + 1] = hex[((uint16buf[i] & 0x000F) >> 0)];
}
//// Add Null char at the end of the string
// HexCharArray[(i * 2) + 2] = 0x00;
}
/*static char hex[] = "0123456789ABCDEF";
void convert_to_hex_str(char* str, uint8_t* val, size_t val_count)
{
for (size_t i = 0; i < val_count; i++)
{
str[(i * 2) + 0] = hex[((val[i] & 0xF0) >> 4)];
str[(i * 2) + 1] = hex[((val[i] & 0x0F) >> 0)];
}
}
*/
/** @fn void SPIdataSetup(uint32_t * Command, uint32_t * Data, uint16 * txBuffer,int WordLength,int NumCmdWords, int NumTxWords )
* @brief convert address and data into word length chunks to be sent
* @param[in] Command - Pointer to command to be sent
* @param[in] Data - Pointer to data to be sent
* @param[in] txBuffer - Pointer to Transmit buffer array of uint16_t members
* @param[in] WordLength - Number of characters specified in the SPI data format Data Format being transmitted
* @param[in] NumCmdWords - Number of words to break the command value into.
* @param[in] NumTxWords - Number of Words to be transmitted.
*
* @return null.
*
* This function populates a transfer buffer array of length equivalent to NumTxWords with data of the form address of the register or and then data.
*/
void SPIdataSetup(uint32_t * Command, uint32_t * Data, uint16 * txBuffer,int WordLength,int NumCmdWords, int NumTxWords ){
static int idataCnt = 0;
for(idataCnt = 0;idataCnt <= NumTxWords;idataCnt = idataCnt + 1)
{
txBuffer[idataCnt] = 0x0; //Reset value
if(idataCnt <= (NumCmdWords - 1))
{
txBuffer[idataCnt] = (uint16_t)(*Command >> (WordLength*(idataCnt)));
}
else
{
txBuffer[idataCnt] = (uint16_t)(*Data >> (WordLength*(idataCnt - NumCmdWords)));
}
}
}
/*
* PMU Support
*/
void initialisePMU()
{
/* PMU calibration */
_pmuInit_();
_pmuEnableCountersGlobal_();
_pmuResetCounters_();
_pmuStartCounters_(pmuCYCLE_COUNTER);
}
uint32 getPMUCycleCounter()
{
return _pmuGetCycleCount_();
}
static uint32 totalCount;
static uint32 lastCycleCount;
void initExecutionTimer()
{
initialisePMU();
totalCount = 0;
lastCycleCount = 0;
}
uint32 getExecutionTimer()
{
uint32 cycleCount = getPMUCycleCounter();
if (cycleCount < lastCycleCount)
{
/*
* We have an overflow...
*/
totalCount += cycleCount + (0xFFFFFFFF - lastCycleCount);
}
else
{
totalCount += (cycleCount-lastCycleCount)/1000;
}
lastCycleCount = cycleCount;
return totalCount;
}
// Function to determine direction of Winch Rope using Proximity Sensors
char determineDirection(uint8_t sensor){
uint16_t Prox1A_Count = 0;
uint16_t Prox1B_Count = 0;
uint16_t Prox2A_Count = 0;
uint16_t Prox2B_Count = 0;
if(sensor == SENSOR1){
Prox1A_Count = PROX1_A_Counter;
Prox1B_Count = PROX1_B_Counter;
return (Prox1A_Count > Prox1B_Count)
? (gioSetBit(gioPORTB, 6, 1), gioSetBit(gioPORTB, 7, 0), 'A')
: (Prox1B_Count > Prox1A_Count)
? (gioSetBit(gioPORTB, 6, 0), gioSetBit(gioPORTB, 7, 1), 'B')
: (gioSetBit(gioPORTB, 6, 0), gioSetBit(gioPORTB, 7, 0), 'C');
// if(Prox1A_Count > Prox1B_Count){
// gioSetBit(gioPORTB, 6, 1); //LED 2 ON
// gioSetBit(gioPORTB, 7, 0); //LED 1 OFF
// return 'A'; // Direction A
// }else if (Prox1A_Count < Prox1B_Count){
// gioSetBit(gioPORTB, 6, 0); //LED 2 OFF
// gioSetBit(gioPORTB, 7, 1); //LED 1 ON
// return 'B'; // Direction B
// }else{
// gioSetBit(gioPORTB, 6, 0); //LED 2 OFF
// gioSetBit(gioPORTB, 7, 0); //LED 1 OFF
// return 'N'; // No clear direction detected
// }
}else if(sensor == SENSOR2){
Prox2A_Count = PROX2_A_Counter;
Prox2B_Count = PROX2_B_Counter;
return (Prox2A_Count > Prox2B_Count)
? (gioSetBit(gioPORTB, 6, 1), gioSetBit(gioPORTB, 7, 0), 'A')
: (Prox2B_Count > Prox2A_Count)
? (gioSetBit(gioPORTB, 6, 0), gioSetBit(gioPORTB, 7, 1), 'B')
: (gioSetBit(gioPORTB, 6, 0), gioSetBit(gioPORTB, 7, 0), 'C');
// if(Prox2A_Count > Prox2B_Count){
// gioSetBit(gioPORTB, 6, 1); //LED 2 ON
// gioSetBit(gioPORTB, 7, 0); //LED 1 OFF
// return 'A'; // Direction A
// }else if(Prox2A_Count < Prox2B_Count){
// gioSetBit(gioPORTB, 6, 0); //LED 2 OFF
// gioSetBit(gioPORTB, 7, 1); //LED 1 ON
// return 'B'; // Direction B
// }else{
// gioSetBit(gioPORTB, 6, 0); //LED 2 OFF
// gioSetBit(gioPORTB, 7, 0); //LED 1 OFF
// return 'N'; // No clear direction detected
// }
}else{
gioSetBit(gioPORTB, 6, 0); //LED 2 OFF
gioSetBit(gioPORTB, 7, 0); //LED 1 OFF
return 'N'; // Invalid sensor number
}
}
// Function to calculate Winch Rope length using Proximity sensors
uint16_t calculateCableLength(uint8_t sensor, char Prox_direction, uint16_t PROX_A_Counter, uint16_t PROX_B_Counter) {
if (sensor != SENSOR1 && sensor != SENSOR2) {
printf("Invalid sensor number\n");
return 0; // Return 0 to indicate an error
}
if (Prox_direction != 'A' && Prox_direction != 'B' && Prox_direction != 'C') {
printf("Invalid direction\n");
return 0; // Return 0 to indicate an error
}
uint16_t pulses = (Prox_direction == 'A') ? PROX_A_Counter : (Prox_direction == 'B') ? PROX_B_Counter : 0;
return (uint16_t)((pulses * CABLE_LENGTH_PER_TOOTH) / TEETH_PER_ROTATION);
}
// Function for proximity sensor 1
void Prox1(){
// Determine the direction for Sensor 1
Prox1_direction = determineDirection(SENSOR1);
cableLengthSensor1 = calculateCableLength(SENSOR1, Prox1_direction, PROX1_A_Counter, PROX1_B_Counter);
}
// Function for proximity sensor 2
void Prox2(){
// Determine the direction for Sensor 2
Prox2_direction = determineDirection(SENSOR2);
cableLengthSensor2 = calculateCableLength(SENSOR2, Prox2_direction, PROX2_A_Counter, PROX2_B_Counter);
}
void vSimulinkTask(void *pvParameters)
{
// ulTaskNotifyTake( pdTRUE,portMAX_DELAY); // (T1)Wait for Simulink code to be initialised
Task_1_Initialised = false;
// const TickType_t xDelay250ms = pdMS_TO_TICKS( 250 );
// /* Send gain settings via SPI */
// SPIdataSetup(&txDpotCmdBuffer[Gain_index], &txDpotDataBuffer[Gain_index], txSPIbuffer,8,1,2 );
// spiTransmitData(spiREG3,&AD7175_8_data_recv_dataconfig,2, txSPIbuffer);
// gioSetBit(gioPORTA, 1, 1); // Set opAmp high
Task_1_Initialised = true;
// xTaskNotifyGive( xInitialisationTaskHandle);
// vTaskPrioritySet( xSimulinkTaskHandle, 4 );
// vTaskPrioritySet( xInitialisationTaskHandle, 4| portPRIVILEGE_BIT );
// ulTaskNotifyTake( pdTRUE,portMAX_DELAY); // Wait for response from initailisation Task
for(;;)
{
/* Simulink generated code variables Read inputs */
//rtPwrOn = gioGetBit(gioPORTB, 1); // //extern boolean_T rtPwrOn; /* '<Root>/powerOn' */
rtjetsonOn = gioGetBit(gioPORTA, 0); // //extern boolean_T rtjetsonOn; /* '<Root>/jetsonOn' */
rtlatch = gioGetBit(gioPORTB, 0); //extern boolean_T rtlatch; /* '<Root>/powerLatch' */
/* Run Simulink generated code */
Hercules_step();
/* Simulink generated code variables Write to outputs */
//gioSetBit(gioPORTA, 2, rtshutdown); //extern boolean_T rtshutdown; /* '<Root>/shutdown' */
gioSetBit(gioPORTB, 4, rtjetsonFCTR); //extern boolean_T rtjetsonFCTR; /* '<Root>/jetsonFCTR' */
gioSetBit(gioPORTA, 5, rtjetsonRestet); //extern boolean_T rtjetsonRestet; /* '<Root>/jetsonRestet' */
gioSetBit(gioPORTA, 7, rtjetsonPwrBtn); //extern boolean_T rtjetsonPwrBtn; /* '<Root>/jetsonPwrBtn' */
// //extern enPowerStates_t rtPowerState; /* '<Root>/PowerState' */
//extern enPowerStates_t rtpowerStateReq;/* '<Root>/powerStateReq' */
// xTaskNotifyGive( xAggregateTaskHandle ); //Start AggregateTaskHandleg
// xTaskNotifyGive( xADCpollingTaskHandle ); //Start ADC polling
// vTaskPrioritySet( xADCpollingTaskHandle, 5 );
// vTaskPrioritySet( xSimulinkTaskHandle, 4 );
// ulTaskNotifyTake( pdTRUE,xDelay250ms);
vTaskPrioritySet( xAggregateTaskHandle, 4 );
//[TODO] remove if not the right approach
// vTaskPrioritySet( xSimulinkTaskHandle, 3 );
sciDisplayText(sciREGx, "Task Simulink... \r\n");
}
#pragma diag_suppress 112 //Remove warning from compiler as it is intentional that the return statement can not be reached.
vTaskDelete( NULL );
}
// ************************************************************************************************
//Aggregate
void vAggregate(void *pvParameters)
{
// Debug Task: used to send extra debug data to a terminal
uint32_t rxDataAddressTest = 15UL;
uint8_t ChannelCount = 0;
uint8_t ChannelBitMask = 0;
const TickType_t x20ms = 20UL / portTICK_PERIOD_MS;
Task_2_Initialised = false;
/* Setup AD7175-8 to specific channel */
// for(BufId = 0;BufId < 4; BufId++)
// {
// SPIdataSetup(&txRX5880AddrWriteBuffer[BufId], &txRX5880DataBuffer[BufId], txSPIbuffer,5,1,5 );
// spiTransmitData(spiREG3,&AD7175_8_Setup_dataconfig,5,txSPIbuffer);
// }
/* [TODO] removed to test read operation
*/ // [TODO] Removed for testing default settings with the reads operation
// Setup Channel 0 for NDT Sensor Signal //
txSPIbuffer[0] = 0x10;
txSPIbuffer[1] = 0x80;
txSPIbuffer[2] = 0x16; //0x10;;
txSPIbuffer[3] = 0x00;
txSPIbuffer[4] = 0x00;
spiTransmitData(spiREG3,&AD7175_8_Setup_dataconfig,3,txSPIbuffer);
// Setup Channel 1 for NDT Sensor Signal
txSPIbuffer[0] = 0x11;
txSPIbuffer[1] = 0x80;
txSPIbuffer[2] = 0x36;//0x30;
txSPIbuffer[3] = 0x00;
txSPIbuffer[4] = 0x00;
spiTransmitData(spiREG3,&AD7175_8_Setup_dataconfig,3,txSPIbuffer);
// Setup Channel 2 for NDT Sensor Signal
txSPIbuffer[0] = 0x12;
txSPIbuffer[1] = 0x80;
txSPIbuffer[2] = 0x56;//0x50;
txSPIbuffer[3] = 0x00;
txSPIbuffer[4] = 0x00;
spiTransmitData(spiREG3,&AD7175_8_Setup_dataconfig,3,txSPIbuffer);
// Setup Channel 3 for NDT Sensor Signal
txSPIbuffer[0] = 0x13;
txSPIbuffer[1] = 0x80;
txSPIbuffer[2] = 0x76;// 0x70;
txSPIbuffer[3] = 0x00;
txSPIbuffer[4] = 0x00;
spiTransmitData(spiREG3,&AD7175_8_Setup_dataconfig,3,txSPIbuffer);
// Setup Setup Config Reg. 0
txSPIbuffer[0] = 0x20;
txSPIbuffer[1] = 0x1F;
txSPIbuffer[2] = 0x00;
txSPIbuffer[3] = 0x00;
txSPIbuffer[4] = 0x00;
spiTransmitData(spiREG3,&AD7175_8_Setup_dataconfig,3,txSPIbuffer);
// Setup ADC Mode Register
txSPIbuffer[0] = 0x01;
txSPIbuffer[1] = 0x07; //0x00;
txSPIbuffer[2] = 0x00; //Continuous conversion //
txSPIbuffer[3] = 0x00;
txSPIbuffer[4] = 0x00;
spiTransmitData(spiREG3,&AD7175_8_Setup_dataconfig,3,txSPIbuffer);
// Setup Interface mode Register
txSPIbuffer[0] = 0x02;
txSPIbuffer[1] = 0x09; //0x01;
txSPIbuffer[2] = 0x40;
txSPIbuffer[3] = 0x00;
txSPIbuffer[4] = 0x00;
spiTransmitData(spiREG3,&AD7175_8_Setup_dataconfig,3,txSPIbuffer);
sciDisplayText(sciREGx, "AD7175-8 Setup Complete... \r\n");
Task_2_Initialised = true;
// *** vADCpolling init
//vDebugTask init
sciDisplayText(sciREGx, "Debug Task Setup Complete... \r\n");
// **** Comms
// Network Communications Task
//Initialisation Section Network Comms
xSocket_t xSocket;
struct freertos_sockaddr xDestinationAddress;
// uint8_t cString[ 100 ];
uint32_t ulCount = 0UL;
/* Send strings to port 9997 on IP address "192.168.169.7" on the scaler. */
xDestinationAddress.sin_addr = FreeRTOS_inet_addr( "192.168.169.7" );
xDestinationAddress.sin_port = FreeRTOS_htons( 9997 );
/* Create the socket. */
sciDisplayText(sciREGx, "Create the socket... \r\n");
xSocket = FreeRTOS_socket( FREERTOS_AF_INET,
FREERTOS_SOCK_DGRAM,/*FREERTOS_SOCK_DGRAM for UDP.*/
FREERTOS_IPPROTO_UDP );
/* Check the socket was created. */
configASSERT( xSocket != FREERTOS_INVALID_SOCKET );
if (xSocket == FREERTOS_INVALID_SOCKET)
{
sciDisplayText(sciREGx, "SOCKET INVALID \r\n");
}
else
{
sciDisplayText(sciREGx, "Socket created. \r\n");
}
sciDisplayText(sciREGx, "Ethernet Network Comms. Setup Complete... \r\n");
// strcpy(cString,"Hello");
// FreeRTOS_sendto( xSocket,
// cString,
// sizeof(cString),
// 0,
// &xDestinationAddress,
// sizeof( xDestinationAddress ) ); //strlen(cString ),
for(;;){
// *** vADCpolling Task
//Read AD7175-8 channels: 4 channels
ChannelCount = 0;
//[TODO] Heartbeat should be tick time count
//Set Heart Beat
NDTLog.Heartbeat = ulCount;
while(ChannelCount < NumEnabledChannelsBitMask){
//Read the status register to see if a data convention has completed
// sciDisplayText(sciREGx, "ADCpolling Task(1039)..... \r\n");
txSPIbuffer[0] = 0x40;
txSPIbuffer[1] = 0x00;
txSPIbuffer[2] = 0x00;
txSPIbuffer[3] = 0x00;
txSPIbuffer[4] = 0x00;
rxSPIstatusBuffer[0] = 0x00;
rxSPIstatusBuffer[1] = 0x00;
// vTaskDelay(x20ms);
spiTransmitAndReceiveData(spiREG3,&AD7175_8_data_recv_dataconfig,2,txSPIbuffer,rxSPIstatusBuffer);
// If Ready Bit set in status register then read new data in data register
if((rxSPIstatusBuffer[1] >> 7) == 0){
// if(spiREG3->PC){
// spiCommand = (uint32 *)0x44;
// spiData = (uint32 *)0x00;
// SPIdataSetup(spiCommand,spiData, txSPIbuffer,8,1,4 );
txSPIbuffer[0] = 0x44; //read data command
txSPIbuffer[1] = 0x00;
txSPIbuffer[2] = 0x00;
txSPIbuffer[3] = 0x00;
txSPIbuffer[4] = 0x00;
rxSPIbuffer[0] = 0x00;
rxSPIbuffer[1] = 0x00;
rxSPIbuffer[2] = 0x00;
rxSPIbuffer[3] = 0x00;
rxSPIbuffer[4] = 0x00;
spiTransmitAndReceiveData(spiREG3,&AD7175_8_data_recv_dataconfig,5,txSPIbuffer,rxSPIbuffer);
// check which channel the data belongs too
// Setup for no CRC, so that index 0 is status register
// [TODO] update to 1 when CRC is in use
rxDataAddressTest = rxSPIstatusBuffer[1] & 0x0F;
ChannelBitMask = (uint8)pow(2,rxDataAddressTest);
switch(rxDataAddressTest ){
case(cNDT1SensorCH):
if(!(ChannelCount & ChannelBitMask)){
// sciDisplayText(sciREGx, "cNDT1SensorCH..... \r\n");
uint16buf2HexString(rxSPIbuffer,sizeof(rxSPIbuffer)-1,strNDTSensor1_Signal);
// ChannelCount |= ChannelBitMask;
NDTLog.NDT1.Signal.ADCvalue = (((uint32_t)rxSPIbuffer[4])<<16)+(((uint32_t)rxSPIbuffer[3])<<8)+(((uint32_t)rxSPIbuffer[2])<<0);
NDTLog.NDT1.Signal.StatusReg = rxSPIstatusBuffer[1];
NDTLog.NDT1.Signal.CRC = 0;
// Converting ADC to 16 bit resolution
Sensor1_Signal = (uint16_t)((rxSPIbuffer[1] << 8) | rxSPIbuffer[2] );
snprintf(Bit16_Sensor1_Signal, sizeof(Bit16_Sensor1_Signal), "%04X", Sensor1_Signal);
}
ChannelCount|= ChannelBitMask;
break;
case(cNDT1NoiseCH):
if(!(ChannelCount & ChannelBitMask)){
// sciDisplayText(sciREGx, "cNDT1NoiseCH..... \r\n");
uint16buf2HexString(rxSPIbuffer,sizeof(rxSPIbuffer)-1,strNDTSensor1_Noise);
// ChannelCount |= ChannelBitMask;
NDTLog.NDT1.Noise.ADCvalue = (((uint32_t)rxSPIbuffer[4])<<16)+(((uint32_t)rxSPIbuffer[3])<<8)+(((uint32_t)rxSPIbuffer[2])<<0);
NDTLog.NDT1.Noise.StatusReg = rxSPIstatusBuffer[1];
NDTLog.NDT1.Noise.CRC = 0;
// Converting ADC to 16 bit resolution
Sensor1_Noise = (uint16_t)((rxSPIbuffer[1] << 8) | rxSPIbuffer[2] );
snprintf(Bit16_Sensor1_Noise, sizeof(Bit16_Sensor1_Noise), "%04X", Sensor1_Noise);
}
ChannelCount |= ChannelBitMask;
break;
case(cNDT2SensorCH):
if(!(ChannelCount & ChannelBitMask)){
// sciDisplayText(sciREGx, "cNDT2SensorCH..... \r\n");
uint16buf2HexString(rxSPIbuffer,sizeof(rxSPIbuffer)-1,strNDTSensor2_Signal);
// ChannelCount |= ChannelBitMask;
NDTLog.NDT2.Signal.ADCvalue = (((uint32_t)rxSPIbuffer[4])<<16)+(((uint32_t)rxSPIbuffer[3])<<8)+(((uint32_t)rxSPIbuffer[2])<<0);
NDTLog.NDT2.Signal.StatusReg = rxSPIstatusBuffer[1];
NDTLog.NDT2.Signal.CRC = 0;
// Converting ADC to 16 bit resolution
Sensor2_Signal = (uint16_t)((rxSPIbuffer[1] << 8) | rxSPIbuffer[2] );
snprintf(Bit16_Sensor2_Signal, sizeof(Bit16_Sensor2_Signal), "%04X", Sensor2_Signal);
}
ChannelCount |= ChannelBitMask;
break;
case(cNDT2NoiseCH):
if(!(ChannelCount & ChannelBitMask)){
// sciDisplayText(sciREGx, "cNDT2NoiseCH..... \r\n");
uint16buf2HexString(rxSPIbuffer,sizeof(rxSPIbuffer)-1,strNDTSensor2_Noise);
// ChannelCount |= ChannelBitMask;
NDTLog.NDT2.Noise.ADCvalue = (((uint32_t)rxSPIbuffer[4])<<16)+(((uint32_t)rxSPIbuffer[3])<<8)+(((uint32_t)rxSPIbuffer[2])<<0);
NDTLog.NDT2.Noise.StatusReg = rxSPIstatusBuffer[1];
NDTLog.NDT2.Noise.CRC = 0;
// Converting ADC to 16 bit resolution
Sensor2_Noise = (uint16_t)((rxSPIbuffer[1] << 8) | rxSPIbuffer[2] );
snprintf(Bit16_Sensor2_Noise, sizeof(Bit16_Sensor2_Noise), "%04X", Sensor2_Noise);
}
ChannelCount |= ChannelBitMask;
break;
default:
// sciDisplayText(sciREGx, "SPI Received Data source is not from any setup channels. \r\n");
break;
}
}
}
/* ............. Test 24bit and 16 bit adc data on terminal ................................ */
// sprintf( (char*)cString,
// "S1%s 16bit%s N1%s 16bit%s S2%s 16bit%s N2%s 16bit%s HB%lu \r\n",
// strNDTSensor1_Signal, Bit16_Sensor1_Signal, strNDTSensor1_Noise, Bit16_Sensor1_Noise, strNDTSensor2_Signal, Bit16_Sensor2_Signal, strNDTSensor2_Noise, Bit16_Sensor2_Noise, ulCount );
sprintf( (char*)cString,
"%s %s %s %s %lu \r\n",
Bit16_Sensor1_Signal, Bit16_Sensor1_Noise, Bit16_Sensor2_Signal, Bit16_Sensor2_Noise, ulCount );
// display the message sent
sciDisplayText(sciREGx,(uint8_t *)cString);
FreeRTOS_sendto( xSocket,
cString,
strlen( cString ),
0,
&xDestinationAddress,
sizeof( xDestinationAddress ) );
/* Increment the msg count */
ulCount++;
}
#pragma diag_suppress 112 //Remove warning from compiler as it is intentional that the return statement can not be reached.
vTaskDelete( NULL );
}
// ************************************************************************************************
/* USER CODE END */
/** @fn void main(void)
* @brief Application main function
* @note This function is empty by default.
*
* This function is called after startup.
* The user can use this function to implement the application.
*/
/* USER CODE BEGIN (2) */
/* USER CODE END */
//[TODO] Set MAC to Production allocated
uint8 emacAddress[6U] = {0x0U, 0x08U, 0x00U, 0x00U, 0x00U, 0x02U}; //{0x0U, 0x08U, 0xEEU, 0x03U, 0xA6U, 0x6CU};
uint32 emacPhyAddress = 1U;
int main(void)
{
/* USER CODE BEGIN (3) */
BaseType_t returnVal = pdFALSE;
sciInit();
sciDisplayText(sciREGx, txtCRLF);
sciDisplayText(sciREGx, "Initialising GIO...\r\n");
gioInit();
sciDisplayText(sciREGx, "Initialising ADC...\r\n");
adcInit();
sciDisplayText(sciREGx, "Enable Interrupt for Proximity Sensors_...\r\n");
_enable_IRQ_interrupt_();
sciDisplayText(sciREGx, "Initialising SPI...\r\n");
// AD7175-8 SPI setup Address and Data Frame
AD7175_8_Setup_dataconfig.CS_HOLD = true;
AD7175_8_Setup_dataconfig.WDEL = true; // was org false
AD7175_8_Setup_dataconfig.DFSEL = SPI_FMT_1;
AD7175_8_Setup_dataconfig.CSNR = SPI_CS_2;
// AD7175-8 SPI Data Receive Format
AD7175_8_data_recv_dataconfig.CS_HOLD = true; // was org false
AD7175_8_data_recv_dataconfig.WDEL = true; // was org false
AD7175_8_data_recv_dataconfig.DFSEL = SPI_FMT_1;
AD7175_8_data_recv_dataconfig.CSNR = SPI_CS_2;
spiInit();
/*
* Initialise the embedded Ethernet interface. The tasks that use the
* network are created in the vApplicationIPNetworkEventHook() hook function
* below. The hook function is called when the network connects.
*/
sciDisplayText(sciREGx, "Initialising IP Layer...\r\n");
returnVal = FreeRTOS_IPInit( ucIPAddress,
ucNetMask,
ucGatewayAddress,
ucDNSServerAddress,
emacAddress);
if (pdFAIL == returnVal)
{
sciDisplayText(sciREGx, "...FAILED\r\n");
}
else
{
sciDisplayText(sciREGx, "IP Initialisation Success.\r\n");
}
/* Initialize Simulink */
// sciDisplayText(sciREGx, "Initialising Simulink...\r\n");
Hercules_initialize();
sciDisplayText(sciREGx, "\r\nCreating Tasks...\r\n");
/*
// Create Task 1
if (xTaskCreate(vTask1,"LowPri-LED2", configMINIMAL_STACK_SIZE, NULL, 1, &xTask1Handle) != pdTRUE)
{
// Task could not be created
while(1);
}
// Create Task 2
if (xTaskCreate(vTask2,"HighPri-LED3", configMINIMAL_STACK_SIZE, NULL, 3, &xTask2Handle) != pdTRUE)
{
// Task could not be created
while(1);
}
*/
/*
if (xTaskCreate(vInitialisationTask,"InitialisationTask", configMINIMAL_STACK_SIZE*1, NULL, 6, &xInitialisationTaskHandle) != pdTRUE)//| portPRIVILEGE_BIT
{
sciDisplayText(sciREGx, "Error Creating Initialisation Task...\r\n");
}
else
{
sciDisplayText(sciREGx, "Created Initialisation Task.\r\n");
}
*/
if (xTaskCreate(vSimulinkTask,"Simulink", configMINIMAL_STACK_SIZE*4, NULL, 2 , &xSimulinkTaskHandle) != pdTRUE)
{
sciDisplayText(sciREGx, "Error Creating Simulink Task...\r\n");
}
else
{
sciDisplayText(sciREGx, "Created Simulink Task.\r\n");
}
if (xTaskCreate(vAggregate,"Aggregate", configMINIMAL_STACK_SIZE*4, NULL, 3 , &xAggregateTaskHandle) != pdTRUE)
{
sciDisplayText(sciREGx, "Error Creating Aggregate...\r\n");
}
else
{
sciDisplayText(sciREGx, "Created Aggregate.\r\n");
}
/*
if (xTaskCreate(vADCpolling,"ADCpolling", configMINIMAL_STACK_SIZE*2, NULL, 6 , &xADCpollingTaskHandle) != pdTRUE)
{
sciDisplayText(sciREGx, "Error Creating ADC polling...\r\n");
}
else
{
sciDisplayText(sciREGx, "Created ADC polling.\r\n");
}
if (xTaskCreate(vEthernetCommsTask,"NetworkComms", configMINIMAL_STACK_SIZE*2, NULL, 3 , &xNetworkCommsTaskHandle) != pdTRUE)
{
sciDisplayText(sciREGx, "Error Creating Network Communications...\r\n");
}
else
{
sciDisplayText(sciREGx, "Created Network Communications.\r\n");
}
if (xTaskCreate(vDebugTask,"DebugTask", configMINIMAL_STACK_SIZE*2, NULL, 5 , &xDebugTaskHandle) != pdTRUE)
{
sciDisplayText(sciREGx, "Error Creating Debug Task...\r\n");
}
else
{
sciDisplayText(sciREGx, "Created Debug Task.\r\n");
}
*/
sciDisplayText(sciREGx, "\r\nStarting Scheduler...\r\n");
/* Start Scheduler */
vTaskStartScheduler(); // vTaskStartScheduler run only once and never execute again untill system reboot.
/* Run forever */
while(1);
#pragma diag_suppress 112 //Remove warning from compiler as it is intentional that the return statement can not be reached.
/* USER CODE END */
return 0;
}
/* USER CODE BEGIN (4) */
void gioNotification(gioPORT_t *port, uint32 bit)
{
if(port == gioPORTB && bit == 2)
{
PB2_Flag = true;
PROX1_A_Flag = true;
PROX1_A_Counter++; // Increment counters for Sensor 1 based on received signal A
}
else if(port == gioPORTA && bit == 0)
{
PA0_Flag = true;
PROX1_B_Flag = true;
PROX1_B_Counter++; // Increment counters for Sensor 1 based on received signal B
}
else if(port == gioPORTA && bit == 6)
{
PA6_Flag = true;
PROX2_B_Flag = true;
PROX2_B_Counter++; // Increment counters for Sensor 2 based on received signal B
}
else if(port == gioPORTA && bit == 7)
{
PA7_Flag = true;
PROX2_A_Flag = true;
PROX2_A_Counter++; // Increment counters for Sensor 2 based on received signal A
}
else
{
PROX1_A_Flag = PROX1_B_Flag = PROX2_A_Flag = PROX2_B_Flag = false ;
}
}
/* USER CODE END */
Did I placed the "void gioNotification(gioPORT_t *port, uint32 bit)" function at the right place in my main.c file?
Below is the gioNotification(gioPORT_t *port, uint32 bit) function in my main.c file:
/* USER CODE BEGIN (4) */
void gioNotification(gioPORT_t *port, uint32 bit)
{
if(port == gioPORTB && bit == 2)
{
PB2_Flag = true;
PROX1_A_Flag = true;
PROX1_A_Counter++; // Increment counters for Sensor 1 based on received signal A
}
else if(port == gioPORTA && bit == 0)
{
PA0_Flag = true;
PROX1_B_Flag = true;
PROX1_B_Counter++; // Increment counters for Sensor 1 based on received signal B
}
else if(port == gioPORTA && bit == 6)
{
PA6_Flag = true;
PROX2_B_Flag = true;
PROX2_B_Counter++; // Increment counters for Sensor 2 based on received signal B
}
else if(port == gioPORTA && bit == 7)
{
PA7_Flag = true;
PROX2_A_Flag = true;
PROX2_A_Counter++; // Increment counters for Sensor 2 based on received signal A
}
else
{
PROX1_A_Flag = PROX1_B_Flag = PROX2_A_Flag = PROX2_B_Flag = false ;
}
}
/* USER CODE END */
Can you help me to fix the code?

