Part Number: TMS570LS1224PGE
Hi,
we currently have exactly the same problem as described in this thread:
Unfortunately no solution was provided there except "it should work this way".
We successfully set up ECAP reading with the example "example_etpwm_ecap". It works perfectly, even when duty cycle or period are changed slightly.
However, we want to capture a 67Hz, 3.3V PWM with a duty cycle of approx. 10-20%, which is very slow in comparison to the generated PWM from the example. In theory, it should be possible to capture signals of up to 53 sec period length before the counter overflows.
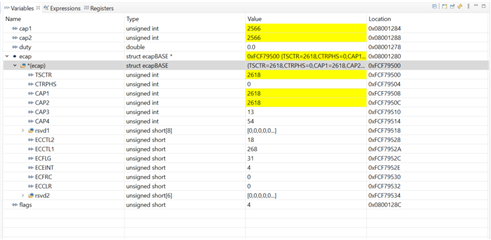
When trying to read our slow signal, all ECAP counters show the same values and thus we only get zeros as duty and period values. It seems like all capture events happen at the same time and a rising & falling edge are triggered at the same time.
We already generated our desired signal (and similiar ones) with different sources to be sure our signal source isn't the issue. The signals look fine in a scope.
Why doesn't the example work with low frequency signals? What needs to be done to read a relatively slow signal?
Best regards
Christian
/** @example example_etpwm_ecap.c
* This is an example which describes the steps to configure ETPWM for generating PWM signal
* and ECAP to capture the same and calculate its frequency and duty cycle,Here ETPWM1A pin is configured
* to generate a PWM wave and is fed to ECAP1 pin.
*
*
* @b Step @b 1:
*
* Create a new project.
*
* Navigate: -> File -> New -> Project
*
* @image html example_createProject.jpg "Figure: Create a new Project"
*
* @b Step @b 2:
*
* Configure driver code generation:
* - Enable ETPWM and ECAP drivers
* - Disable others
*
* Navigate: -> TMS570LS12x/RM46 -> Enable Drivers
*
* @b Step @b 3:
*
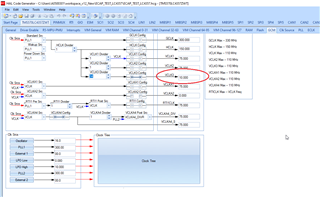
* Configure PINMUX to enable ETPWM1A and ECAP1 pins (or enable ETPWM and ECAP checkboxes)
*
* Navigate: -> PINMUX -> Pin Muxing
*
* Enable TBCLK sync
*
* Navigate: -> PINMUX -> Special Pin Muxing
*
* @b Step @b 4:
*
* Enable ECAP1 Interrupt in VIM (Channel 104)
*
* Navigate: -> TMS570LS12x/RM46 -> VIM Channel 96-127
*
* @b Step @b 4:
*
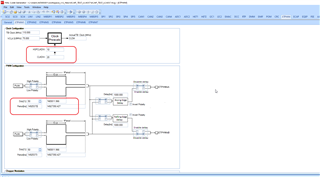
* Configure EPWM1A with specified duty and period
*
* @image html etpwm_module_enable.jpg "Figure: Enable ETPWM modules"
* @image html etpwm_config.jpg "Figure: EPWM1A configuration"
*
* @b Step @b 5:
*
* Configure ECAP1 as follows
*
* @image html ecap_module_enable.jpg "Figure: Enable ETPWM modules"
* @image html ecap_config.jpg "Figure: EPWM1A configuration"
*
* @b Step @b 6:
*
* Connect the pin ETPWM1A and ECAP1:
*
*
* @b Step @b 7:
*
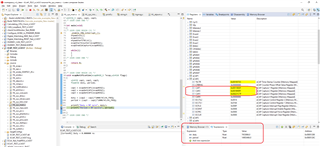
* Copy the source code below into your sys_main.c or replace sys_main.c with this file.
*
* The example file can also be found in the examples folder: ../HALCoGen/examples
*
* @note HALCoGen generates an empty main function in sys_main.c,
*
*
*/
/*
* Copyright (C) 2009-2015 Texas Instruments Incorporated - www.ti.com
*
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the
* distribution.
*
* Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
* A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
* OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
* SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES INCLUDING, BUT NOT
* LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
* DATA, OR PROFITS; OR BUSINESS INTERRUPTION HOWEVER CAUSED AND ON ANY
* THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
* INCLUDING NEGLIGENCE OR OTHERWISE ARISING IN ANY WAY OUT OF THE USE
* OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
*/
/* USER CODE BEGIN (0) */
/* USER CODE END */
/* Include Files */
#include "sys_common.h"
/* USER CODE BEGIN (1) */
#include "stdio.h"
#include "system.h"
#include "etpwm.h"
#include "ecap.h"
/* USER CODE END */
/** @fn void main(void)
* @brief Application main function
*
*/
/* USER CODE BEGIN (2) */
/* USER CODE END */
void main(void)
{
/* USER CODE BEGIN (3) */
_enable_interrupt_();
#if 1
/* Initialise EPWM and ECAP with GUI configuration */
etpwmInit();
ecapInit();
#else
/* Alternate code for configuring ETPWM and ECAP */
/* Configure ETPWM1 */
/* Set the TBCLK frequency = VCLK4 frequency = 90MHz */
etpwmSetClkDiv(etpwmREG1, ClkDiv_by_1, HspClkDiv_by_1);
/* Set the time period as 1000 ns (Divider value = (1000ns * 90MHz) - 1 = 89)*/
etpwmSetTimebasePeriod(etpwmREG1, 89);
/* Configure Compare A value as half the time period */
etpwmSetCmpA(etpwmREG1, 45);
/* Configure mthe module to set PWMA value as 1 when CTR=0 and as 0 when CTR=CmpA */
etpwmActionQualConfig_t configPWMA;
configPWMA.CtrEqZero_Action = ActionQual_Set;
configPWMA.CtrEqCmpAUp_Action = ActionQual_Clear;
configPWMA.CtrEqPeriod_Action = ActionQual_Disabled;
configPWMA.CtrEqCmpADown_Action = ActionQual_Disabled;
configPWMA.CtrEqCmpBUp_Action = ActionQual_Disabled;
configPWMA.CtrEqCmpBDown_Action = ActionQual_Disabled;
etpwmSetActionQualPwmA(etpwmREG1, configPWMA);
/* Start counter in CountUp mode */
etpwmSetCount(etpwmREG1, 0);
etpwmSetCounterMode(etpwmREG1, CounterMode_Up);
etpwmStartTBCLK();
/* Configure ECAP1 */
/* Configure Event 1 to Capture the rising edge */
ecapSetCaptureEvent1(ecapREG1, RISING_EDGE, RESET_DISABLE);
/* Configure Event 2 to Capture the falling edge */
ecapSetCaptureEvent2(ecapREG1, FALLING_EDGE, RESET_DISABLE);
/* Configure Event 3 to Capture the rising edge with reset counter enable */
ecapSetCaptureEvent3(ecapREG1, RISING_EDGE, RESET_ENABLE);
/* Set Capure mode as Continuous and Wrap event as CAP3 */
ecapSetCaptureMode(ecapREG1, CONTINUOUS, CAPTURE_EVENT3);
/* Start counter */
ecapStartCounter(ecapREG1);
/* Enable Loading on Capture */
ecapEnableCapture(ecapREG1);
/* Enable Interrupt for CAP3 event */
ecapEnableInterrupt(ecapREG1, ecapInt_CEVT3);
#endif
/* ... run forever */
while(1);
/* USER CODE END */
}
/* USER CODE BEGIN (4) */
void ecapNotification(ecapBASE_t *ecap,uint16 flags)
{
uint32 cap1, cap2, cap3;
float64 duty, period;
cap1 = ecapGetCAP1(ecapREG1);
cap2 = ecapGetCAP2(ecapREG1);
cap3 = ecapGetCAP3(ecapREG1);
duty = (cap2 - cap1)*1000/VCLK4_FREQ;
period = (cap3 - cap1)*1000/VCLK4_FREQ;
printf("Duty = %fns\n", duty);
printf("Period = %fns\n\n", period);
}
/* USER CODE END */