Other Parts Discussed in Thread: MSPM0L2228, SYSCONFIG
Tool/software:
Hi,
I have 2 questions.
1)
I am using the Ti sample (sysctl_power_policy_sleep_to_stop) to change RunSleep0 to Stop2 and vice versa.
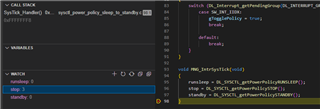
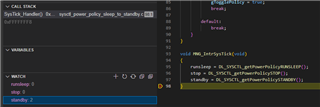
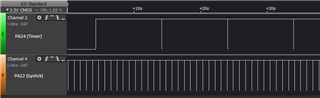
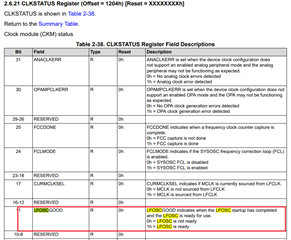
However, SYSOSC cannot be enabled after the power policy is changed from Stop2 to RunSleep0. (the return value of DL_SYSCTL_getPowerPolicyRUNSLEEP() is RunSleep3)
I also tested Stop0/1→RunSleep0, Standby0/1→RunSleep0, and all were normal. (the return value of DL_SYSCTL_getPowerPolicyRUNSLEEP() is RunSleep0)
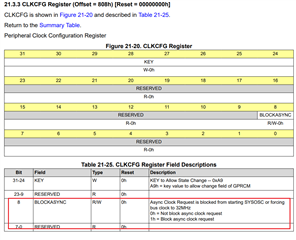
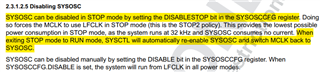
According to the 「MSPM0 L-Series 32MHz Microcontrollers」 specs, SYSCTL will automatically re-enable SYSOSC and switch MCLK back to SYSOSC.
Is there something wrong with my code? Or do I need to set something when changing from Stop2 to RunSleep0?
I've attached the code (.c and .syscfg) to reproduce the issue.
/*
* Copyright (c) 2021, Texas Instruments Incorporated
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*/
#include "ti_msp_dl_config.h"
#define MNG_IntrSysTick SysTick_Handler
volatile bool gTogglePolicy;
int main(void)
{
SYSCFG_DL_init();
gTogglePolicy = false;
NVIC_EnableIRQ(SW_INT_IRQN);
DL_SYSCTL_POWER_POLICY_RUN_SLEEP runsleep;
DL_SYSCTL_POWER_POLICY_STOP stop;
DL_SYSCTL_POWER_POLICY_STANDBY standby;
while (1) {
gTogglePolicy = false;
runsleep = DL_SYSCTL_getPowerPolicyRUNSLEEP();
stop = DL_SYSCTL_getPowerPolicySTOP();
standby = DL_SYSCTL_getPowerPolicySTANDBY();
DL_SYSCTL_setPowerPolicySTOP2();
//DL_SYSCTL_setPowerPolicySTANDBY0();
while (false == gTogglePolicy) {
__WFI();
}
gTogglePolicy = false;
runsleep = DL_SYSCTL_getPowerPolicyRUNSLEEP();
stop = DL_SYSCTL_getPowerPolicySTOP();
standby = DL_SYSCTL_getPowerPolicySTANDBY();
DL_SYSCTL_setPowerPolicyRUN0SLEEP0();
}
}
void GROUP1_IRQHandler(void)
{
switch (DL_Interrupt_getPendingGroup(DL_INTERRUPT_GROUP_1)) {
case SW_INT_IIDX:
gTogglePolicy = true;
break;
default:
break;
}
}
void MNG_IntrSysTick(void)
{
}
2)
The Stop0/1/2 or Standby0/1 mode is the deep sleep mode in ARM. However, the systick still operates normally in these two modes. Do I need to stop it manually?
Thanks!