Other Parts Discussed in Thread: HALCOGEN
Tool/software:
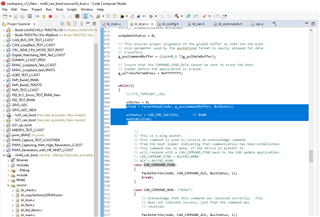
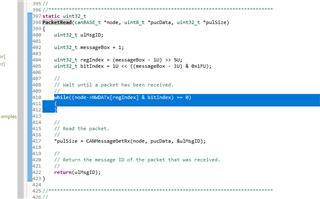
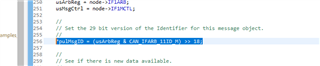
I am going through the CAN library for the TMS57012, and it appears like I am stuck on the following line:
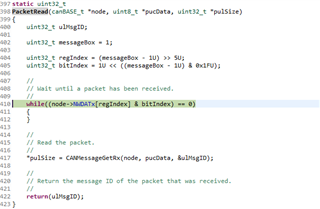
When I send CAN packets and check on the oscilloscope as well as my IXXAT tool, there are no errors, and the TX line is sending an acknowledgement. But in the debugger, the code does not seem to move past this line.
Both the TMS570 and the IXXAT are set to 500 kbit/s, the ID of the packet is 1, DLC is 8, and the data I am sending is 0x11 22 33 44 55 66 77 88. Is there anything I am missing when I send the packet?
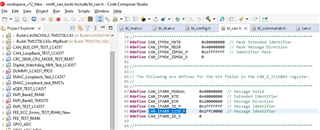
All this code was from the Example Project Hercule Safety MCU 6.3 Bootloader here: 6.1. Project 0 — Hercules Safety MCUs Documentation.