Other Parts Discussed in Thread: TCA6424, TMDSCNCD263P, SYSCONFIG
Tool/software:
I am working with the AM263Px-cc on a proof of concept project, and I am currently trying to get the mcan peripheral working.
I have loaded the mcan_external_read_write example project from MCU+ SDK for AM263Px - 09.02.00.55.
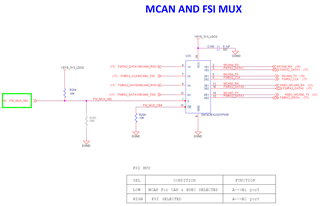
I have updated the syscfg to set the mcan peripheral to CAN4 to take advantage of the CAN transceiver on the control card. The project builds successfully and I am able to enter debug mode as expected.
However, I am unable to see any CAN data transmitted out of the 3 pin CAN header (J5). Stepping through the code, I can see where it calls commands to transmit, but nothing is seen at J5.
I have also used my oscilloscope to monitor R172, which is a jumper resistor from the CAN4 Tx pin of the AM263Px going into the TCAN1043ADYYRQ1 CAN Transceiver. That line is held high, and no change is seen when CAN Transmissions should be occurring.