Part Number: AM2434
Tool/software:
Hello
I am currently using the PRU in SD Mode. To use GPIOs, I have to rely on the General-Purpose Interface (GPIO). My issue is that the timing of these external peripherals is less precise and shows some unusual behavior.
The test program is quite simple and generates a PWM signal. Pin multiplexing is handled by an R5F program, following the configuration described in the corresponding FAQ article, using the same settings.
LDI R1.w2, 0x60
LDI R1.w0, 0x1000 ;GPIO1 Baseaddress (0x601000)
LDI R2.w0, 0x18 ;GPIO_SET_DATA01 offset
LDI R3.w0, 0x1C ;GPIO_CLR_DATA01 offset
LDI R4.w0, 0x01 ;bit 1 -> output 0
CHECK_PROCESSING_TIMING:
SBBO &R4, R1, R2, 4 ;set General-Purpose Interfaces connected Pin High
SET R30, R30, 1 ;set PRU connected Pin 1 High
NOP
NOP
NOP
NOP
NOP
NOP
NOP
NOP
NOP
SBBO &R4, R1, R3, 4 ;set General-Purpose Interfaces connected Pin Low
CLR R30, R30, 1 ;set PRU connected Pin 1 Low
NOP
NOP
NOP
NOP
NOP
NOP
NOP
NOP
JMP CHECK_PROCESSING_TIMING
HALT
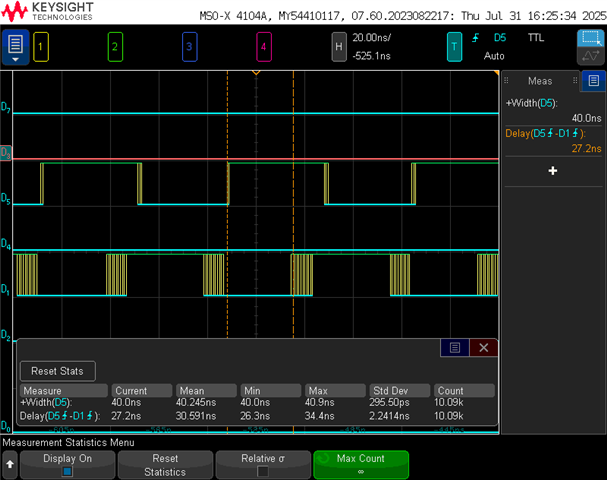
When the timing is correct, as demonstrated in the example code, the signal from the General-Purpose Interface shows a delay of approximately 27ns plus one clock cycle (3.3ns) with acceptable jitter. However, if I remove just one operation from the loop and the period no longer aligns with some internal timing of the SoC, I observe significant jitter in the General-Purpose Interface output. The standard deviation is 2.24ns, and the delay can vary between 26.3 and 34.4ns plus one clock cycle (3.3ns).
Is there a way to achieve always the better timing performance when using the PRU with the General-Purpose Interface?
Regards
Niklas